PuzzleCAM - ICIP 2021
Contents
PuzzleCAM - ICIP 2021#
Information
Title: Puzzle-CAM: Improved localization via matching partial and full features, ICIP 2021
Reference
Review By: 김태규
Last updated on Aug. 13, 2022
INTRODUCTION#
대부분의 WSSS가 segmentation network의 학습을 위해 CAM에 기반반 pseudo-labels을 생성하는 접근 방식을 사용한다.
이 과정에서 가장 큰 문제는 CAM이 class를 가장 잘 구분하기 위한 영역에만 activation된다는 점이다.
CAMs 는 객체의 작은 부분을 효과적으로 탐지 하지만 전체적으로 segmentation은 못한다.
Fig. 113에서 원본이미지의 CAM과 tile로 자른 이미지의 CAM이 다르게 표현된다.
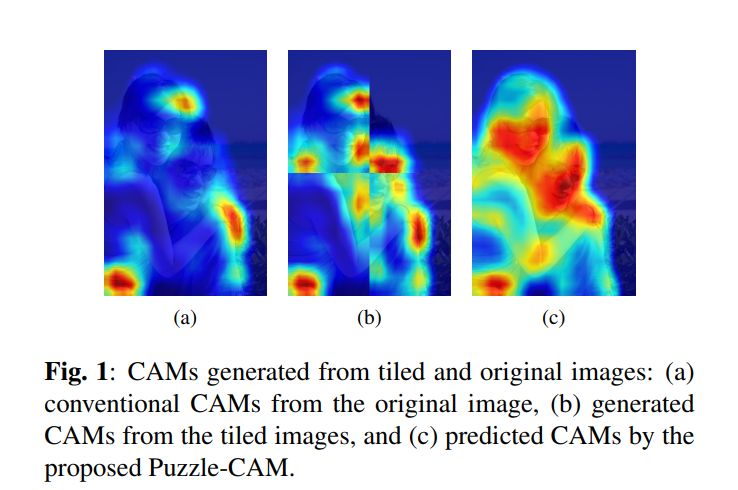
Fig. 113 CAM generated from tiled and original images (source: arXiv:2101.11253)#
통합된 객체 영역을 검출을 위한 WSSS을 위해 Attention-based feature learning 기법을 사용한 Puzzle-CAM을 제안.
Self-supervision을 제공하기 위해 tiled image와 원본 image에서 생성된 CAM에 대해Reconstructing regularization을 적용함.
Network prediction consistency를 위해 image와 tiled image에서 생성되어 merge된 CAM을 분리하는 puzzle module을 제안함. (without adding layers)
Puzzle-CAM은 원본이미지의 CAM과 병합된 CAM간의 차이를 줄이는 Reconstructing regularization loss가 존재하는 샴 네트워크 형태로 구성된다.
Proposed Method#
1. Motivation#
단일 이미지의 CAM은 각 클래스의 가장 대표적인 영역을 탐지하므로, 동일한 클래스의 CAM을 생성할 때 모델은 객체의 일부분만을 사용하여 클래스의 key feature를 찾는데 집중한다.
패치가 병합된 CAM은 단일이미지의 CAM보다 저 정확하게 표현하므로, 이런 장점을 활용하기 위해, 단일이미지의 CAM과 merged CAM의 차이를 최소화 하기 위하여 Reconstructing loss를 적용함.
Reconstructing loss를 적용하여 classification network를 학습함으로써 더 정확하게 객체영역을 커버할 수 있음.
2. The employed CAM Method#
Feature extractor \(F\)와 classifier \(\theta\)가 주어졌을 때, CAM \(A\)를 생성할 수 있다. lmage leve supervision(class label)를 이용하여 classifier를 학습한 후, class c의 CAM을 추출하기 위해 c-channel classifier \(\theta_c\)를 weight로 적용한다.
생성된 CAM에서 최대값 기준으로 normalized하고, 각 class별로 CAM을 생성한 후 concat하여 CAM \(A_c\)를 생성한다.
3. The Puzzle Module#
Puzzle module은 입력 영상을 겹치지 않도록 4개의 tiled patches \(\{I^{1,1},I^{1,2},I^{2,1},I^{2,2}\}\) 로 분할한 후 각 tiled image에 대해 CAM \(A^{i,j}\)를 생성한다.
생성된 tiled image의 CAM을 merge하여 단일 CAM \(A^{re}\)를 생성한다.
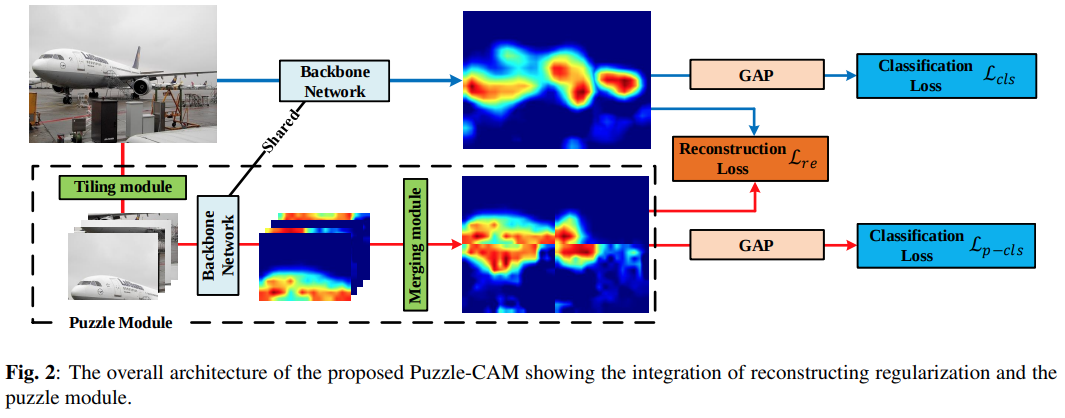
Fig. 114 The overall architecture of the Puzzle-CAM (source: arXiv:2101.11253)#
4. The Loss Design for Puzzle-CAM#
이미지 classification을 위한 prediction vector \(\hat{Y}=\sigma(G(A_c))\)를 도출하고, soft-margein loss를 적용하기 위해 Global Average Pooling(GAP) layer를 network 마지막에 적용한다.
\[\begin{split} \hat{Y}=\begin{cases} \hat{Y}, & \text{if $Y=1$}\\ 1-\hat{Y}, & \text{otherwise} \end{cases} \end{split}\]\[ \mathcal{l}_{cls}(\hat{Y},Y)=-\log(Y_t) \]원본 영상에 대한 CAM \(A^s\) 와 tiled image에서 구한 CAM을 merge한 \(A^{re}\)를 GAP를 통해 prediction vector를 구한 후 각각 classification loss를 구한다.
\[\begin{split} \mathcal{L}_{\text{cls}}=\mathcal{l}_{\text{cls}}(\hat{Y}^s,Y), \\ \mathcal{L}_{\text{p-cls}}=\mathcal{l}_{\text{cls}}(\hat{Y}^{re},Y) \end{split}\]\(\mathcal{L}_{cls}\)는 Original image에서 이어지는 Classification loss (CrossEntropy)
\(\mathcal{L}_{p-cls}\)는 Puzzle Module에서 이어지는 Classification loss (CrossEntropy)
Reconstruction Loss \(\mathcal{L}_{re}\)는 Original image의 CAM과 Puzzle Module에서 나온 CAM의 L1 loss로 정의된다.
최종적으로 final loss는 다음과 같이 정의된다.
\[ L=L_{\text{cls}}+L_{\text{p-cls}}+\alpha L_{re} \]여기서 \(\alpha\)는 loss간의 balance factor이다.
Classification loss의 경우 대략적인 object의 영역을 찾을 수 있고, reconstruction loss는 pixel level supervision과 image-level supervision의 차이를 정의한다.
Experimental Result#
1. Implementation details#
320~640 randomly scale → cropped (512x512)
알파 = 4를 최댓값으로 놓고, 1/2 epoch마다 선형적으로 증가시켰다.
PASCAL VOC 2012 data와 Semantic Boundary Dataset 사용. 다른 WSSS 연구와 동일.
추론(Inference)할 때는 퍼즐 모듈없이 classifier만 적용.
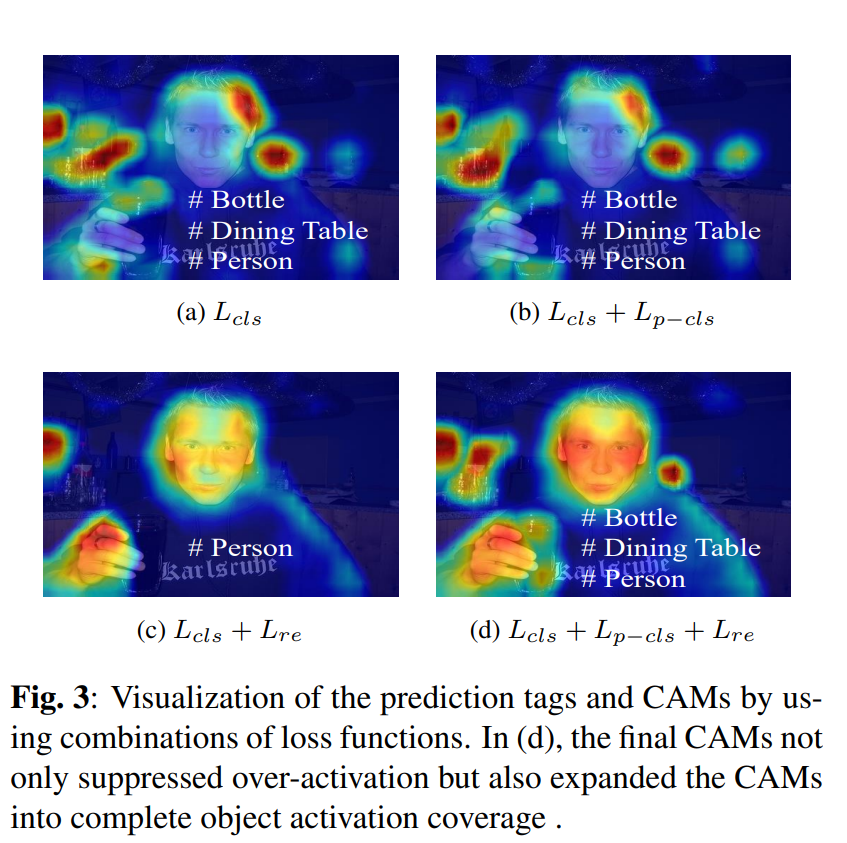
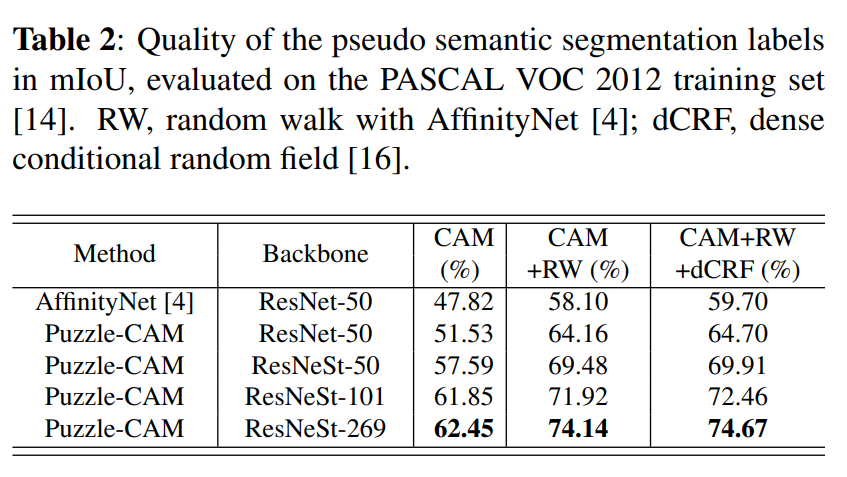
2. Ablatation Studies#
3가지 종류의 loss를 모두 더하여 사용하였더니 더 좋은 결과를 얻을 수 있었다.
AffinityNet에서 사용된 Random walk과 dCRF 기법을 사용하여 더욱 좋은 성능 낼 수 있었다.
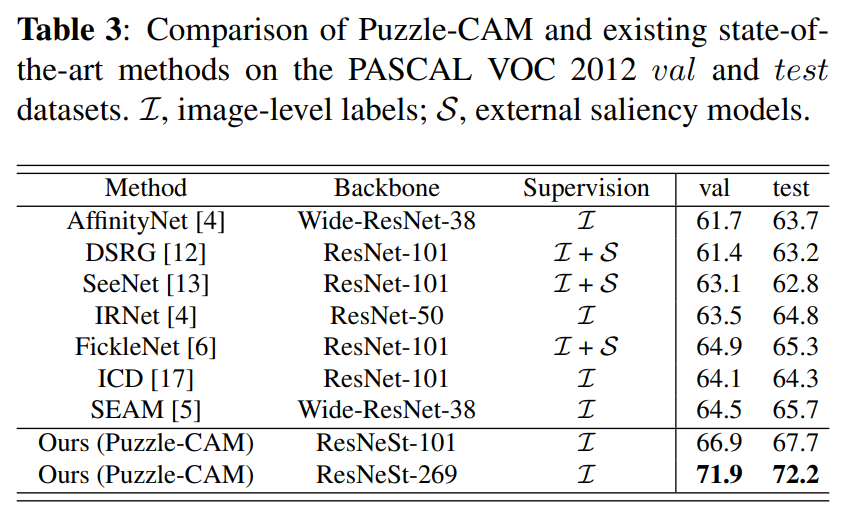
3. Comparison with Existing State-of-the-Art Methods#
Puzzle-CAM을 적용한 결과 VOC2012 validation set과 test set에서 기존 WSSS 방법 대바 높은 성능을 나타냄을 확인할 수 있다.