SOLOv2 - NeurIPS 2020
Contents
SOLOv2 - NeurIPS 2020#
Information
Title: SOLOv2: Dynamic and Fast Instance Segmentation , NeurIPS 2020
Reference
Review By: Chanmin Park
Last updated on Aug. 13, 2022
Problem Statement and Contribution#
SOLO[]는 별도의 bounding box prediction 및 pixel간의 pairwise relation 정보 없이 instance mask를 구하는 framework으로 다음과 같은 한계가 존재한다.
Inefficient mask representation and learning
좋은 퀄리티의 mask predictions을 얻기 위해 resolution이 충분하지 않음.
느린 mask NMS 속도
본 논문에서는 SOLO architecture를 개선을 목표로 convolution kernel learning 및 이를 이용한 feature learning기법과 inference 속도 개선을 위한 fast NMS 기법을 적용한 SOLOv2 구조를 제안한다.
Proposed Method#
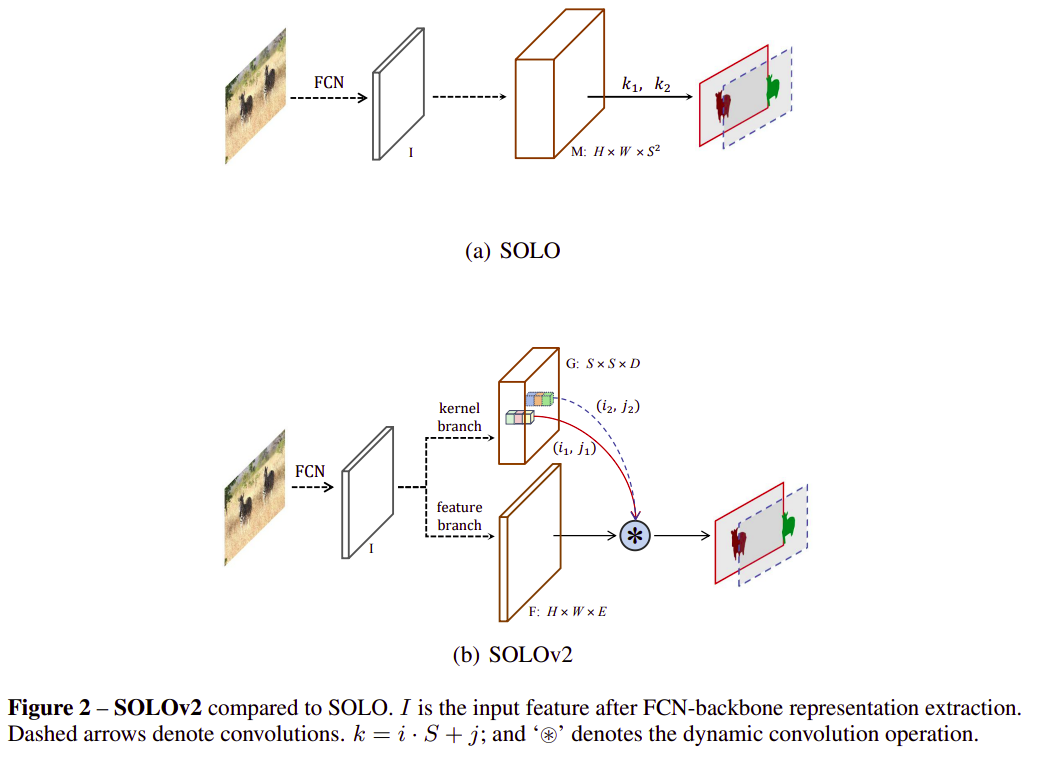
Fig. 51 SOLOv2 campared to SOLO (source: arXiv:2003.10152)#
1. Dynamic Instance Segmentation#
SOLO architecture의 경우 \(S^2\) channel의 instance mask를 생성한다. 입력 영상에 대해 FPN(feature pyramid network)을 이용하여 \([H \times W \times E]\) dimension의 feature를 추출 후 이를 다시 \(S^2\) channel로 변환하는 과정을 거친다.
Pyramid feature중 특정 level에서 추출한 feature가 주어질 때 \(F \in \mathbb{R}^{H \times W \times E}\) 위 과정을 수식으로 표현하면 다음과 같다.
\[ M_{i,j}=G_{i,j}*F \]여기서 \(G_{i,j}\in\mathbb{R}^{1\times1\times E}\)는 \((i,j)\) grid에 적용되는 convolution kernel를 나타낸다. \(m_{i,j}\in \mathbb{R}^{H\times W}\)은 최종 mask이며 \((i,j)\) grid에 하나의 Instance의 중심좌표가 포함된 경우를 나타낸다.
SOLO model은 inference/training 과정에서 위 연산 과정을 거치는데, memory를 필요로 하고 특히나 큰 resolution에 대해서는 높은 computation cost가 필요한 문제가 있다.
대부분의 경우에서 영상안의 instance는 분리되어 있기 때문에 mask \(M\)연산하는 과정에 \(S^2\) kernel을 적용하는 것은 효율적이지 않다.
만약 \(F\)와 \(G\)를 따로 학습할 수 있다면, dynamic하게 사용함으로 segmentation의 location을 효과적으로 찾을 수 있다.
(1) Mask Kernal Branch (\(G\))
Backbone과 FPN이 주어지면, 모든 level의 pyramid feature에 대해 feature mask kernel \(G\)를 predict한다.
\(I\) 번째 pyramid 에서 추출한 feature \(F_I\in\mathbb{R}^{H_I\times W_I \times C}\)가 입력되면 grid cell (\(S \times S \times C\))로 resize한다.
4번의 3x3 convolution과 마지막 \((3\times 3\times D)\) kernel을 이용한 convolution을 적용하여, 최종 kernel \(G\)를 얻는다. 첫번째 convolution은 CoordConv를 적용하여 coordinates를 normalize한다.
이 과정을 통해 각 level의 feature 마다 D-dimension의 아웃풋이 생성되며, \(3\times 3\) kernel을 predict하는 경우 \(D=9E\)가 되도록 구성한다. (최종 output에는 activation function을 적용하지 않는다.)
(2) Mask feature branch (\(F\))
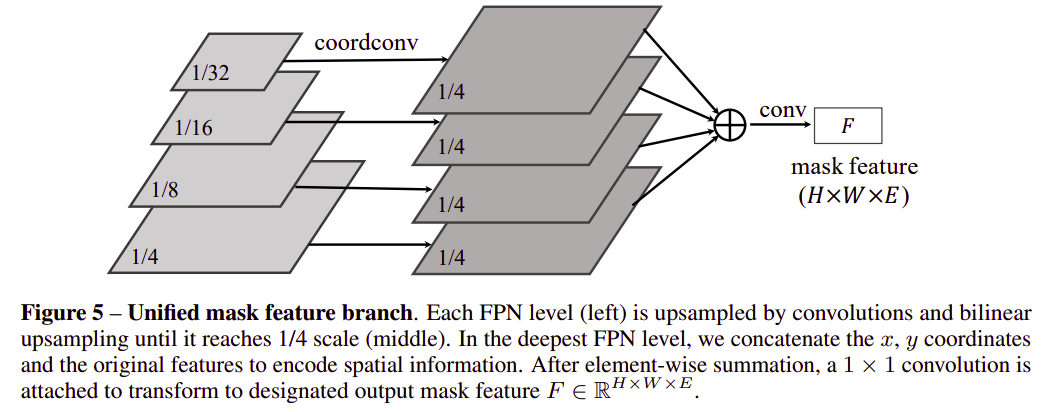
Fig. 52 Unified mask feature branch in SOLOv2 (source: arXiv:2003.10152)#
SOLOv2 model은 mask kernel과 feature가 각각 학습되는 구조로, mask feature branch를 2가지 case로 구성할 수 있다.
Kernel branch와 함께 head 구성하여 각 pyramid lavel에 대해 feature 추출
모든 level의 feature를 fusion 후 unified mask feature 추출
논문에서는 실험을 통해 unifed mask featrure를 추출하는 것이 효율적임을 확인하고 적용하였다.
입력의 1/4 size로 bilinear upsampling 후 sum한 후 수 차례의 convolution 연산을 수행하여 feature를 추출한다.
이 과정에서 정확한 위치 정보를 전달하기 위해 가장 깊은 level의 pyramid feature에 대해 CoordConv. 를 적용하여 normalized 된 coordinate 정보를 전달한다. 이는 position sensitivity와 predicting instance-aware features를 위해 중요하다.
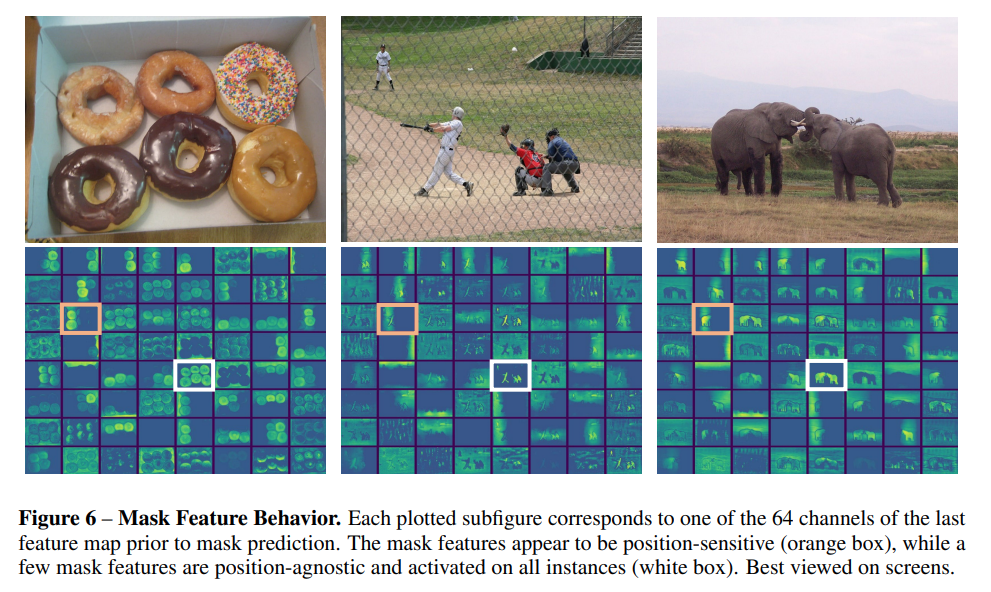
Fig. 53 Mask Feature Behavior (source: arXiv:2003.10152)#
Fig. 53은 64 output channels (\(E=64\))일 때 최종 feature map을 나타낸다.
황색 box의 mask feature와 같이 특정 position에 맞는 영역이 activation되는 feature와 흰색 box와 같이 모든 instance 혹은 배경에만 activation되는 mask feature를 모두 추출함을 알 수 있다.
(3) Forming Instance Mask
각 \((i,j)\) grid cell에 대해 먼저 mask kernel \(G_{i,j,:}\in\mathbb{R}^{D}\) 를 계산한다.
Instance mask를 구하기 위해 mask kernel을 feature \(F\)와 convolution연산을 수행한다.
최종적으로 각 prediction level에 대해 \(S^2\)개의 mask를 계산한 후 NMS를 적용하여 최종 instance segmentation 결과를 도출한다.
(4) Learning and inference
Focal loss + Dice loss를 적용
\[ \mathcal{L}=\mathcal{L}_{\text{cate}}+\lambda\mathcal{L}_{\text{mask}} \]여기서 \(\mathcal{L}_{\text{cate}}\)는 semantic category classficiation을 위한 Focal Loss이며, \(\mathcal{L}_{\text{mask}}\)는 mask prediction을 위한 Dice Loss이다.
Inference 과정에서 입력된 영상에 대해 backbone과 FPN을 거쳐 category score \(\mathbf{p}_{i,j}\)를 구한 후, 첫번째 confidence threshold 0.1을 적용하여 낮은 confidence인 prediction 결과를 제거한다. 최종적으로 threshold 0.5를 적용하여 최종 soft mask를 도출한다.
2. Matric NMS#
기존 NMS의 느린 속도를 개선하기 위해 soft-NMS [22]방법을 변형한 방법을 제안함.
Soft-NMS의 경우 overlay된 detection score에 단조 감소 함수 \(f(\text{iou})\)를 적용한다. 이때 높은 IoU를 가지는 경우 score 감소폭을 크게하여 작은 score threshold로 제거할 수 있도록 한다.
하지만, 이런 과정은 Greedy NMS와 마찬가지고 병렬 processing이 불가능한 한계가 있다.
이를 보완하기 위해 Matrix NMS 방법을 제안한다. Matrix NMS의 decay factor는 다음 두가지 factor에 영향을 받는다.
Prediction score에 의한 penalty →Soft-NMS와 마찬가지로 단조 감소 함수 \(f(\text{iou}_{i,j})\)로 쉽게 계산 가능
mask prediction \(m_i\)가 제거될 확률
보통 확률은 IoU와 양의 상관관계를 가짐을 이용한다.
논문에서는 가장 많이 겹친 두 prediction에 대해 제거될 확률의 근사값을 바로 구한다.
\[ f(\text{iou},i)=\min_{\forall{s_{k}}>s_i}f(\text{iou}_{k,i}) \]최종 decay factor를 다음과 같이 구한다.
\[ \text{decay}_j=\min_{\forall{s_{k}}>s_i}\frac{f(\text{iou}_{i,j})}{f(\text{iou}_{,i})} \]여기서 감소 함수는 linear \(f(\text{iou}_{i,j})=1-\text{iou}_{i,j}\)와 Gaussian \(f(\text{iou}_{i,j})=\exp\left( -{\text{iou}^2_{i,j}}/{\sigma}\right)\) 를 적용할 수 있다.
최종적으로 decay factor를 이용하여 score를 update한다.
\[ s_j=s_i\cdot\text{decay}_j \]Implementation
def matrix_nms(scores, masks, method=’gauss’, sigma=0.5): # scores: mask scores in descending order (N) # masks: binary masks (NxHxW) # method: ’linear’ or ’gauss’ # sigma: std in gaussian method # reshape for computation: Nx(HW) masks = masks.reshape(N, HxW) # pre−compute the IoU matrix: NxN intersection = mm(masks, masks.T) areas = masks.sum(dim=1).expand(N, N) union = areas + areas.T − intersection ious = (intersection / union).triu(diagonal=1) # max IoU for each: NxN ious_cmax = ious.max(0) ious_cmax = ious_cmax.expand(N, N).T # Matrix NMS, Eqn.(4): NxN if method == ’gauss’: # gaussian decay = exp(−(iousˆ2 − ious_cmaxˆ2) / sigma) else: # linear decay = (1 − ious) / (1 − ious_cmax) # decay factor: N decay = decay.min(dim=0) return scores ∗ decay
Experimental Result#
1. Implementation Details (SOLO와 동일)#
Optimization: Stochastic gradient descent (SDG), synchronized SGD over 8 GPUs
Batch Size: 16
Learning Rate
초기 learning rate는 0.01로 설정되며, 27 epoch에서 10으로 나누고(lr=0.001), 33번때 epoch에서 다시 한번 10으로 나눈 값을 사용함 (lr=0.0001).
Weight decay 0.0001, momentum 0.9를 적용함.
ImageNet Pre-trained weight 적용
짧은 image side의 크기가 640~800 pixel 사이로 random하게 sampling하는 scale jitter를 적용함.
2. Main Result#
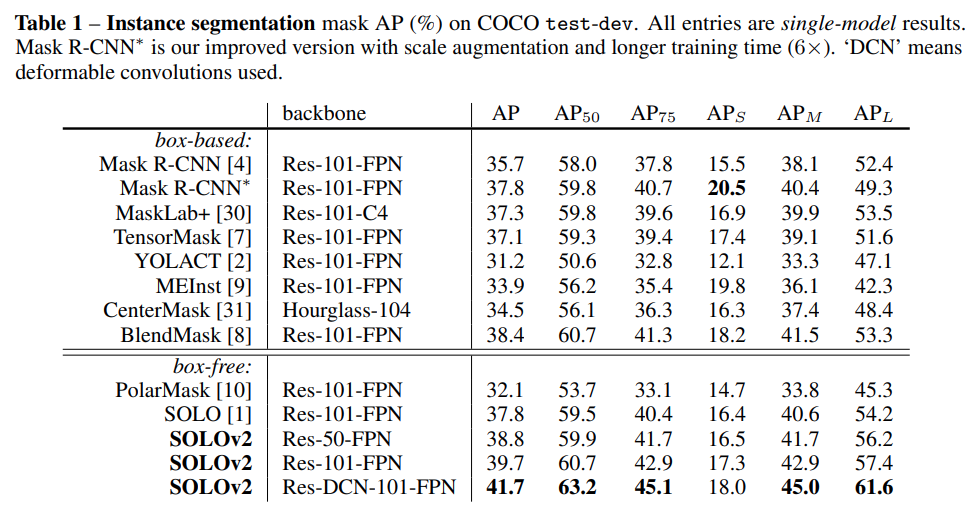
MS COCO test-dev에서 성능을 비교한 결과, ResNet-101 backbone을 사용한 SOLOv2가 mask AP 39.7%로 기존 방법모드 높은 성능을 나타냄을 확인할 수 있다.
다만 small object에 대한 성능 \(AP_S\) 의 경우 저자가 학습한 mask R-CNN 보다 낮은 성능을 나타내었다.
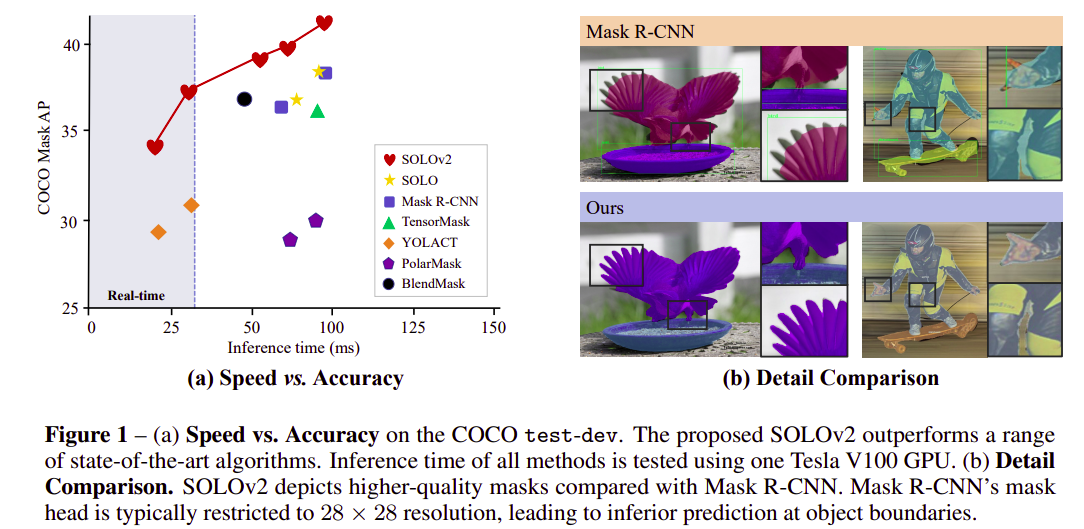
COCO dataset에서 속도-성능 trade-off를 나타내보면, 기존 instance segmentation 방법대비 SOLO v2 모델이 빠른 inference time 대비 높은 성능을 나타냄을 알 수 있다.

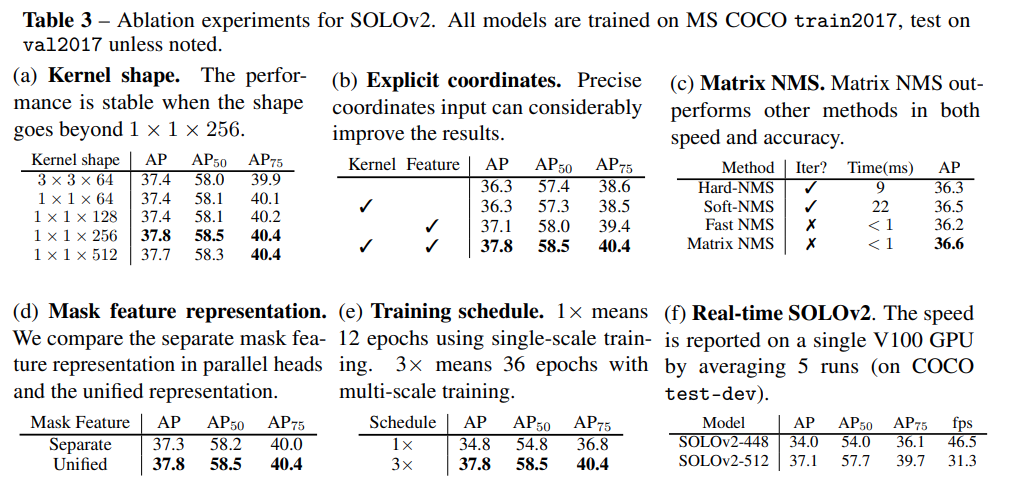
3. Ablation Experiment#
Kernel shape을 비교한 결과 1x1와 3x3 kernel을 적용했을 때 거의 동등한 성능을 나타냄. (Table 3 (a)
CoordConv를 적용하여 normalized 된 coordinate 정보를 kernel과 feature에 모두 추가했을 때 성능 개선이 있음. (Table 3 (b))
제안된 Matrix-NMS가 기존 방법대비 빠른 속도와 높은 AP를 가짐을 확인함. (Table 3 (c))
Mask feature learning 과정에서 각 pyramid level별로 head로 구성하는 것 보다, unified representation을 적용한 경우가 더 높은 성능을 나타냄. (Table 3 (d))