PanopticFPN - CVPR 2019
Contents
PanopticFPN - CVPR 2019#
Information
Title: Panoptic Feature Pyramid Networks, CVPR 2019
Reference
Review By: Taeyup Song
Edited by: Taeyup Song
Last updated on Fab. 6, 2022
Contribution#
Instance Segmentation을 위한 Mask R-CNN의 확장 버전으로 Feature Pyramid Networks (FPN)를 공용으로 활용하는 추가의 semantic segmentation brach를 이용 panoptic segmentation 이 가능함을 보임.
“Things” class에 대한 Instance level의 mask의 성능은 유지하면서, “stuff” class에 대한 dense prediction도 통일된 network 구조로 수행함.
Proposed Method#
1. Model Architecture#
Panoptic segmenatation을 수행하기 위해 다음과 같은 사항이 고려되어야 함.
a. High-resolution: 미세한 구조(fine structure)를 포착하기 위해 적절하게 고해상도이어야 함.
b. Rich: 정확한 class labels 추정을 위해 충분히 풍부한 semantics가 encode 되어야 함.
c. Multi-scale feature: 다양한 크기의 stuff region을 예측하기 위해 multi-scale information을 capture 해야 함.
FPN은 이미 3가지 조건을 만족하고 있음.
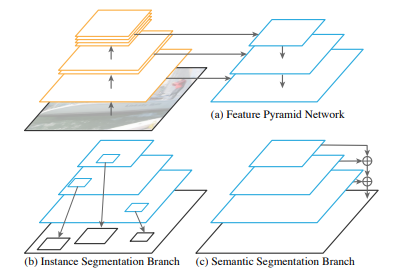
Fig. 71 Panoptic FPN architecture (source: arXiv:1901.02446)#
(1) Feature Pyramid Network (FPN)
FPN은 다양한 resolution의 feature를 추출하기 위해 보편적으로 사용되는 network이며, ResNet과 같은 feature extractor에 top-down pathway를 추가하여 높은 해상도의 feature map의 semantic level을 높일 수 있도록 설계되어 있음.
보통 1/32에서 1/4 resolution을 가지는 feature를 추출하도록 구성됨.
(2) Instance segmentation branch
FPN을 구성할 때, region-based object detector를 붙이기 쉽도록 모든 pyramid level에 동일한 channel 수(일반적으로 256 channel)가 되도록 구성함.
Faster R-CNN의 경우 RoI pooling을 각 level의 feature에 적용하여 candidate에 대한 feature를 추출한 후 classfication과 bounding box refine을 수행함.
(3) Semantic segmentation branch
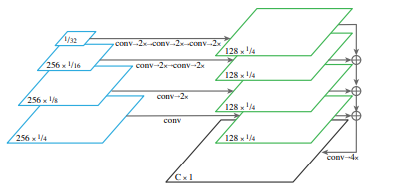
Fig. 72 Semantic segmentation branch (source: arXiv:1901.02446)#
FPN의 각 level별 feature를 1/4 scale에 맞춰 upsample함. 각 upsample 과정에서 3x3 convolution과 group norm, ReLU를 적용한 후 2x bilinear upsampling을 수행. (각 feature의 scale에 따라 최종적으로 1/4 scale이 되도록 반복적으로 적용함)
최종적으로 upsampling된 features들을 element wise sum한 후 1x1 convolution, 4x bilinear upsampling한 후 softmax 를 적용하여 원본 크기의 pixel별 class labels을 추정함.
stuff class에는 ‘other’ class를 추가하여 things에 해당하는 pixel을 assign함.
2. Inference and Training#
(1) Panoptic Inference
output의 각 pixel은 하나의 class label과(void 포함) instance id (stuff classes에서는 무시)를 가짐.
Panopic FPN의 결과물은 instance /semantic brach의 결과가 중복될 수 있기 때문에 NMS와 유사한 후처리를 적용함. a. 서로 다른 instance를 가지는 경우 confidence score를 기준으로 결정 b. instacen, semantic segmentation결과가 겹치는 경우 instance 값을 우선으로 함. c. stuff region의 label 중 ‘other’ class는 area threshold를 적용하여 삭제.
(2) Joint training
Instance segmentation branch는 \(L_C\)(classification), \(L_B\)(bounding-box loss), \(L_m\)(mask loss)를 의 총합으로 계산함. \(L_C\), \(L_B\)는 sampled RoIs 수로 normalizae하고, \(L_m\)은 foreground RoIs수로 normalizae함.
Semantic segmentation loss \(L_s\)는 per-pixel cross entropy loss로 계산함.
두 branch의 loss는 서로 다른 scale과 normallize 정책을 적용함.
\[ L=\lambda_i(L_C+L_b+L_m)+\lambda_sL_s \]
3. Analysis#

Fig. 73 Backbone architechture (source: arXiv:1901.02446)#
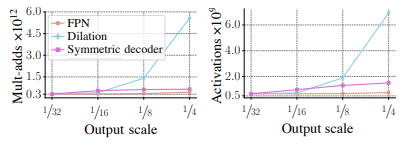
Fig. 74 Backbone architecture efficiency (source: arXiv:1901.02446)#
Panoptic FPN의 경우 Mask-RCNN 구조를 활용하는 것이 목표였지만, dilated-8 network 대비 가볍고 encoder-decoder 구조 대비 2배 가벼운 구조를 가짐을 확인할 수 있음.
특히 Dilation-16 network와 유사한 크기의 network로 4배 큰 output resolution을 얻을 수 있음.
Experimental Result#
1. Traning details#
COCO 2017 dataset → Instance segmentation: 80 thing classes, train/val/test/ = 118k/5k/20k → Semantic segmentation: 92 stuff classes, train/val/test/ = 40k/5k/5k → Panoptic segmentation: 80 things / 53 stuff classes
Mask R-CNN 1x training setting with scale jitter을 적용함.
2. Discuss#
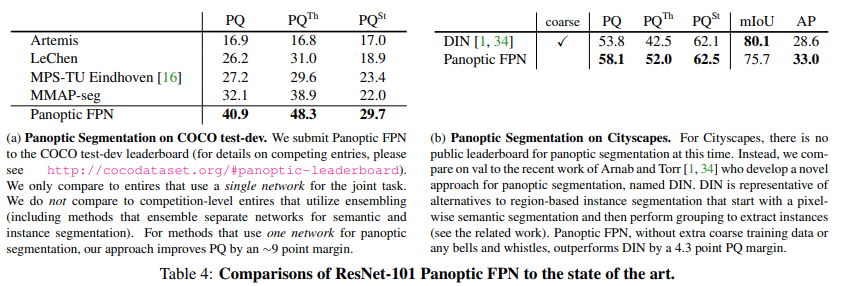
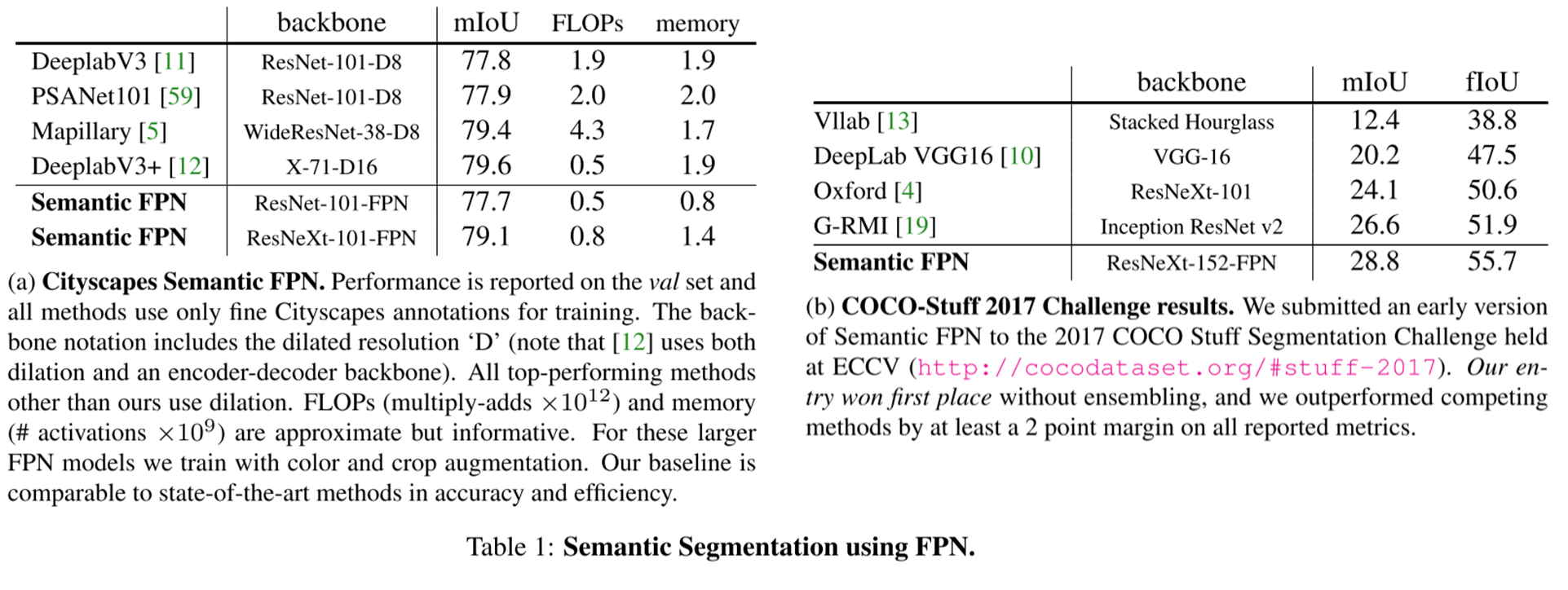
Semantic segmentation을 단독으로 평가했을 때, COCO-stuff 2017 challenge에서 가장 높은 성능을 나타냄. cityscape DB에서는 SOTA인 DeepLab V3+와 유사한 성능과 efficiency를 보임을 알 수 있음.
Panoptic segmentation을 기존 방법들과 비교했을 때, overall, stuff, thing 모두 높은 성능을 나타냄.