Mask R-CNN - ICCV 2017
Contents
Mask R-CNN - ICCV 2017#
Title: Mask R-CNN
Review By: Hwigeon Oh
Edited by: Taeyup Song
Reference#
Contribution#
Faster R-CNN을 확장한 network를 이용하여 instance segmentation 수행
RPN, detection head에 추가로 mask head가 추가된 구조로 bounding box에 대해 mask prediction 추가로 수행 (각 bounding box에 대해 mask prediction 수행)
classification, bbox regression, segmentation이 병렬로 구성되어 학습로직 구성이 쉬움
ROI pooling을 개선한 ROI Align 제안
ROI pooling과 달리 quantization없는 방법으로 pooling 과정을 정교하게 수행하여 segmentation 성능을 개선.
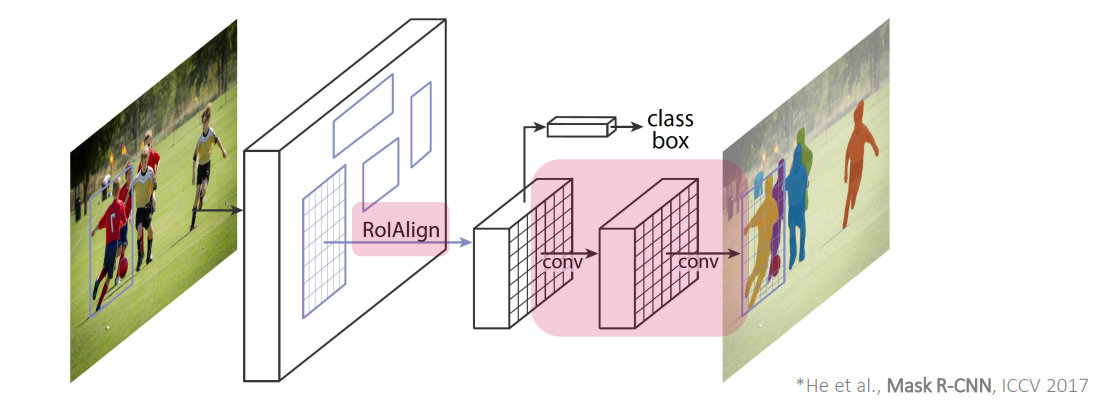
Fig. 54 The Mask R-CNN framework (source arXiv:1703.06870)#
Architecture#
classification, bbox regression, segmentation이 병렬로 구성한 end-to-end train 구조
class, bbox와는 분리해서 독립적으로 segmentation mask를 구성
Translation/Scale equivalent를 유지하도록 설계함.
Convolution, FCN: translation equivalent
ConvNet: translation-invariant (Pooling을 통해 feature map의 resolution을 축소하는 과정에서 translate에 대한 효과가 감소한다고 알려져 있음)
ROI Align: scale equivalent 하다고 주장
FPN: scale-equivariance
Bounding Box 내 object의 mask에 집중하여, ROI 내 작은 변화에 대해서만 equivalent를 유지하는 것이 목표
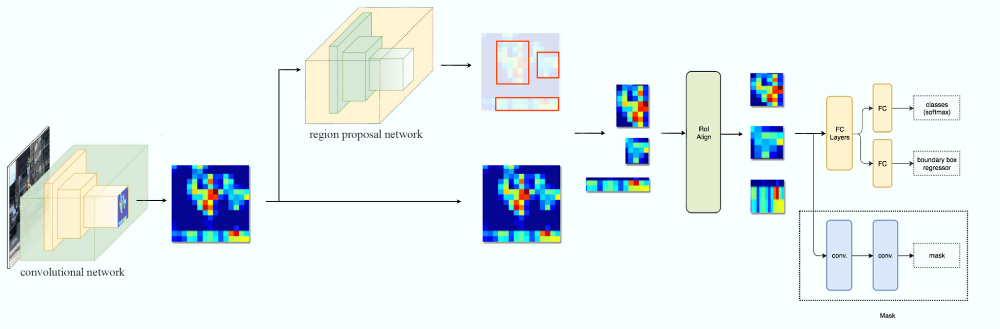
Fig. 55 Architecture (image from https://medium.com/@jonathan_hui/image-segmentation-with-mask-r-cnn-ebe6d793272)#
1. Feature Extraction#
ResNet-50 또는 ResNet-101 backbone 사용
입력 영상을 1024x1024x3으로 resize (bilinear interpolation)
ResNet의 경우 800~1024크기의 입력을 사용하는 것이 가장 좋다고 알려져 있음
FPN 구조로 5단계 feature map 추출
ResNet backbone의 경우 feature map은 \([4, 8, 16, 32, 64]\)의 stride를 가짐.
입력영상 대비 \([1/4, 1/8, 1/16, 1/32, 1/64]\)배 크기의 feature map이 생성됨.
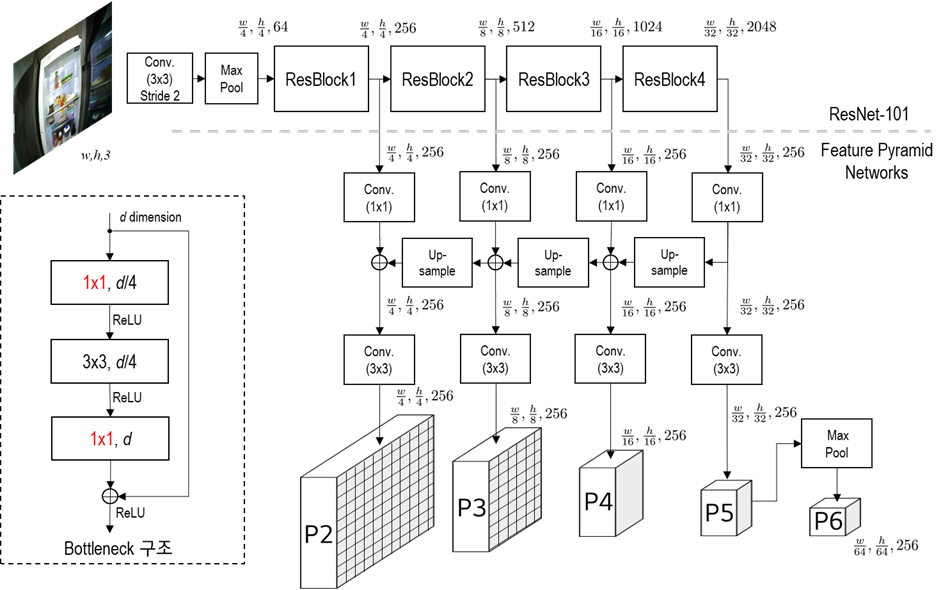
Fig. 56 Feature Extraction#
2. Region Proposal Network#
Faster R-CNN과 동일한 구조
모든 pyramid level의 feature map에 대해 Region proposal 추출
anchor는 3종류 사용 → FPN으로 scale에 대한 대응 가능
Implementation
저자의 code에서는 최대 크기의 입력 영상 \((1024, 1024, 3)\)에 대해 다음과 같이 anchor를 생성해서 사용함.
anchor의 크기는 각 feature map level에 따라 각 feature 위치를 중점으로 \([32, 64, 128, 256, 512]\) 크기로 생성함.
Anchor stride를 1로 설정하여 모든 feature point에서 3가지 종류의 anchor 생성
Anchor scale로 normalize한 후 return
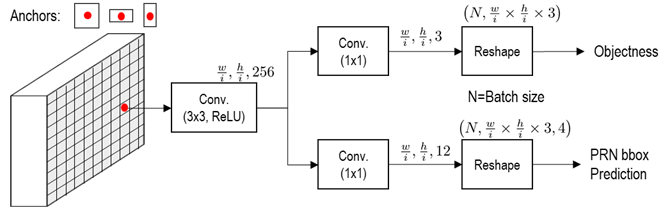
Fig. 57 Region Proposol Network (RPN)#
Cls lauer→ 각 anchor에 대해 가장 높은 IoU를 가지고, \(IoU\) 0.7 이상 box는 object, \(IoU\) 0.3 이하는 배경으로 선택
최종 output dim.: \(w/i \times h/i \times \text{(anchor 수)}\)
Reg layer: 각 bounding box의 좌표 offect을 prediction함.
(k개의 anchor에 대해 4개 좌표를 최종 fitting함.
최종 output dim.: \(w/i \times h/i \times \text{(anchor 수)}*4\text{(좌표 offset)}\)
3. Detection Head#
RPN을 통해 선정된 각 proposal 영역에 대해 ROI align 과정을 통해 최종 feature를 추출
추출된 proposal의 특징을 이용하여 classification 및 bounding box regression 수행
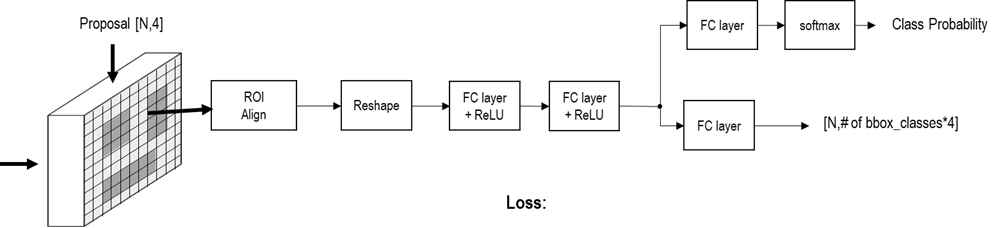
Fig. 58 Detection head architecture#
후처리 과정을 통해 최종 detection bounding box 도출

Fig. 59 Post processing for bounding box#
4. Mask Head#
Detection head에서 판정된 bbox와 class prediction 값을 이용하여 mask를 구함.
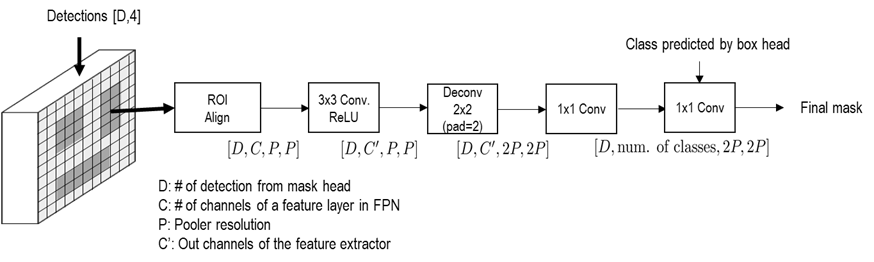
Fig. 60 Mask head Achitecture#
5. Loss function#
classification loss \(L_\text{cls}\): cross entropy loss
bbox regression loss \(L_\text{box}\) : smooth \(L_1\) loss
mask loss \(L_\text{mask}\)
mask branch에 대해 (\(Km^2\)-dimension)binary cross-entropy loss 적용 (FCN과 동일)
Experimental Result#
1. Implementation Details#
Datasets
Ground truth 대비 IoU 0.5 이상인 경우 positive sample로 사용하며, mask loss \(L_{\text{{mask}}}\)의 경우 positive sample에 의해서만 정의됨.
Image-centric training[12]를 적용하며, 입력 영상은 짧은 변을 기준으로 800pix로 resize 함.
Training
mini-batch는 GPU당 영상 2개를 사용하며, pos./neg. sample 비율을 1:3으로 구성한 \(N\)개의 RoIs를 사용. (C4: N=64, FPN: N=512)
8 GPU (mini-batch size 16), 160k iteration
Learning rate: 0.02부터 120k 까지 10번 감소시킴
Weight decay: 0.0001 with momentum 0.9
Inference
C4에서 300개, FPN에서 1000개의 candidate를 추출.
box prediction brench에서 NMS 등 후처리 적용 후 score가 높은 10% 의 candicate에 대해 mask prediction 수행하여 mask prediction에 따른 overhead를 최소화.
bbox prediction시 도출된 \(k\)번째 class에 대한 mask prediction 수행하고, binarize 0.5 적용하여 최종 mask 도출
2. Main Result#
COCO test-dev set에서 비교한 결과 기존 방법 대비 높은 \(mask AP\)를 보임을 알 수 있음.
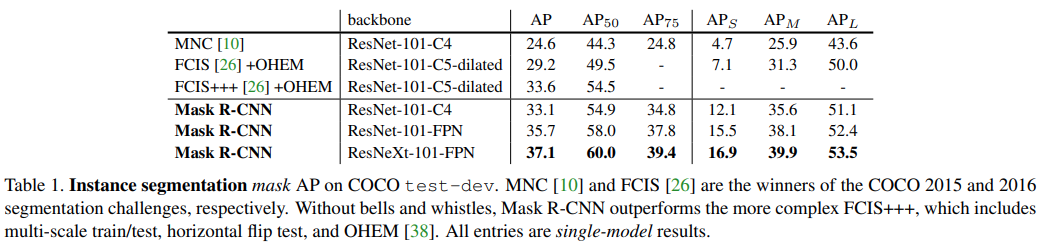
RoIAlign와 RoIPool 적용 후 비교한 결과 논문에서 제안한 RoIAlgin 적용시 RoIPool 방법 대비 +7.3%의 \(mask AP\) 개선이 있음을 확인할 수 있다.
Table 2 추가
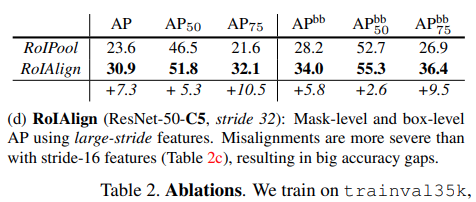
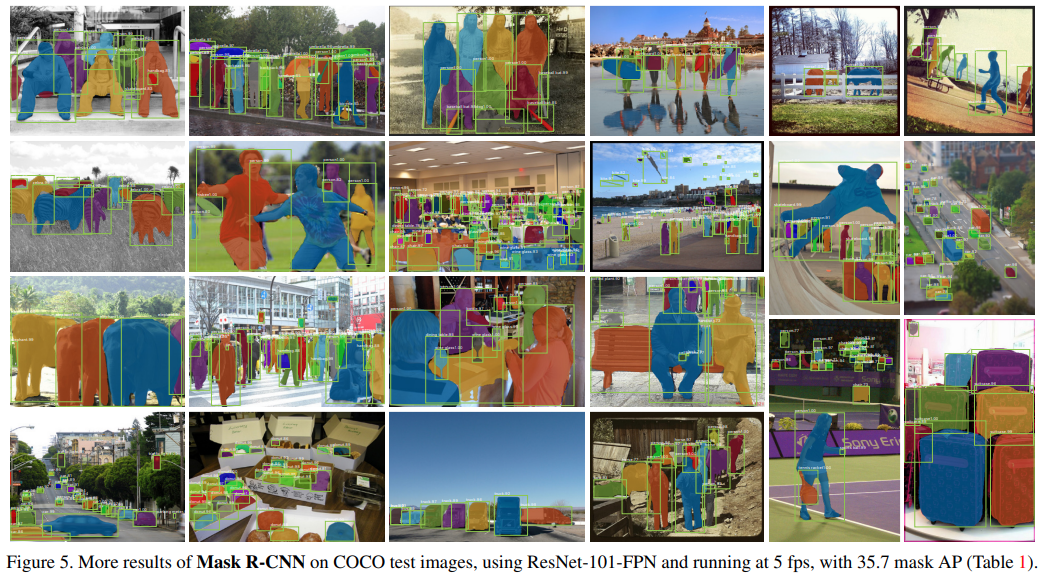
Figure 5. More resolts of Mask R-CNN on COCO test images, using ResNet-101-FPN and running 5fps, with 35.7 mask AP