2.2 Project transformation#
2D projective geometry는 projective plane
Projection은
Projectivity#
Projectivity는 역이 성립하는 평면
에서 로의 mapping projection 를 의미합니다. 예를 들어, , 같은 선 상에 존재한다면, , , 도 같은 선 상에 존재합니다.
이러한 projection을 collineation, projective transformation, homography 라고도 부릅니다.
Projective transformation#
Plane의 Projective transformation은 homogeneous 3-vector에서 non-singular 3x3 행렬에 의해 표현되는 선형 변환입니다.
또는, 간결하게로 표현할 수 있습니다.
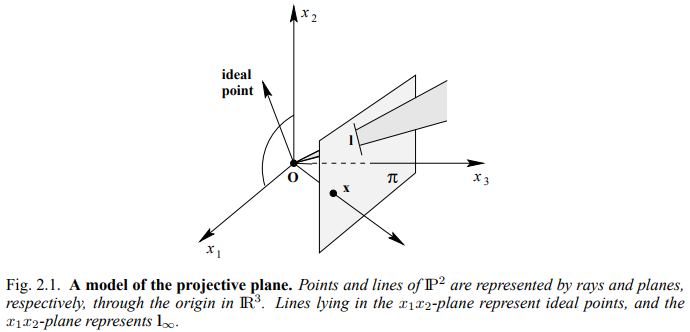
Projective transformation은 동일한 projective space 내 모든 plane을 투영적으로 동등하게 projection 시키며, 모든 이 사영 속성들은 invariant 합니다. 위 그림 2.1의 ray 모델에서 projective transformation은
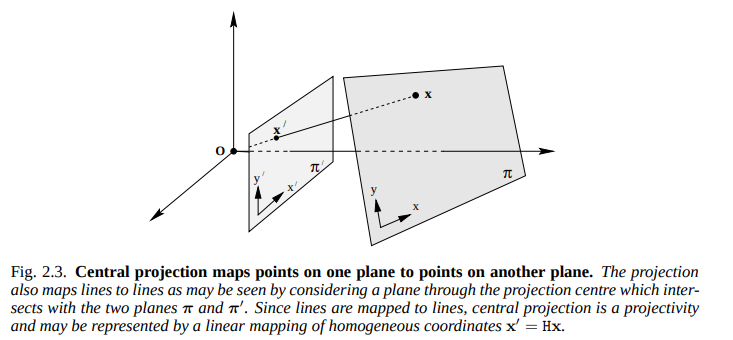
Mapping of planes#
위 그림 2.3은 동일한 projective space에 존재하는 두 평면이 존재할 때 원점
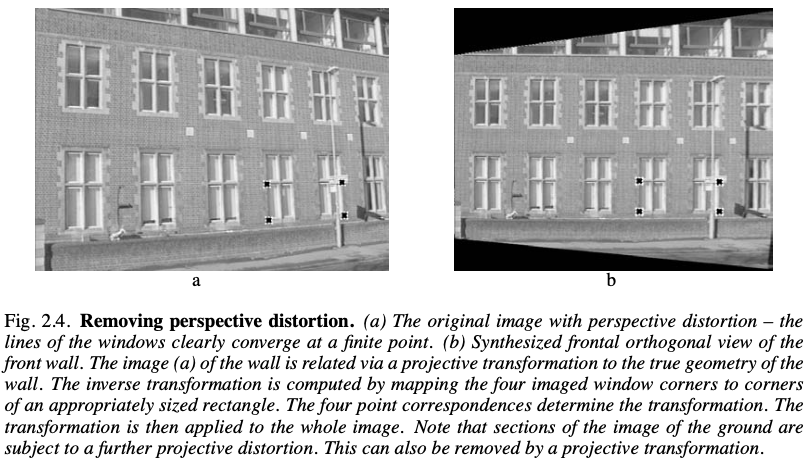
Removing the projective distortion from a perspective image#
Perspective 이미지에서 real world에서의 모양은 왜곡됩니다. 위 그림 2.4의 a는 그 예를 보여줍니다. 위에서 얘기했듯, projective projection의 dof는 8입니다. 따라서 4개의 점을 지정해서 projective projection을 정의할 수 있는데, 여기서는 원래는 평행한 두 직선을 지정해 다시 평행해지도록 transformation을 적용해 사영 왜곡을 삭제했습니다.
homogeneous 좌표로부터 inhomogeneous 좌표로의 변형은 위와 같이 표현할 수 있습니다. 각 포인트는 H원소에 대한 두 등식으로 표현될 수 있습니다.
위와 같은 equation을 통해 projective transformation에 의해 점이 이동할 위치를 계산할 수 있습니다. 점을 선정할 때 주의할 점은 세 점이 같은 직선 위에 존재하면 안 된다는 것입니다.
이렇게 계산된 projective transformation
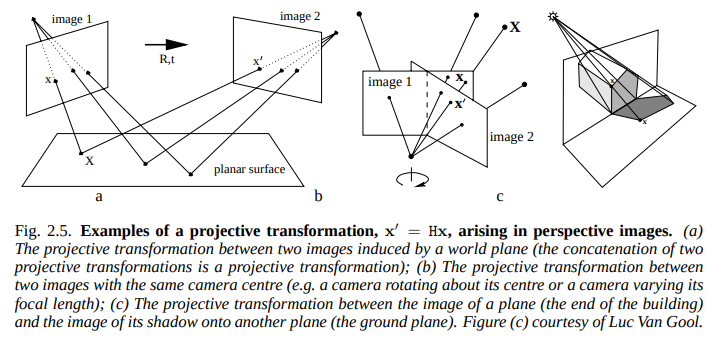
그림 2.5는
Reference#
Multiple view geometry in computer vision chapter 2.3