GAIA-1: A Generative World Model for Autonomous Driving¶
Information
0. Summary¶
GAIA-1은 자율주행 장면을 video + text + action token sequence로 바꾸고, GPT처럼 다음 image token을 예측한 뒤, diffusion decoder로 미래 주행 비디오를 생성하는 generative world model이다.
직관적으로 정리하면 다음과 같다.
“내 차가 지금 이 장면에서 이렇게 움직이면, 앞으로 도로가 어떻게 변할까?”를 비디오로 상상하는 모델
핵심 방법론
-
Multimodal tokenization
주행 video, text prompt, ego action을 Transformer가 다룰 수 있는 token sequence로 바꾼다. -
Autoregressive world model
언어 모델이 다음 단어를 예측하듯, GAIA-1은 다음 image token을 예측한다. -
Video diffusion decoder
예측된 image token을 사람이 볼 수 있는 high-quality future driving video로 복원한다.
핵심 기여
-
자율주행 world modeling을 next-token prediction 문제로 재정의했다.
world model을 reward/state 예측 중심의 latent model이 아니라, action/text-conditioned future video generation으로 확장했다. -
생성형 모델 기반 neural simulator의 가능성을 보여줬다.
policy를 직접 학습하는 논문은 아니지만, 자율주행 모델 학습·검증에 쓸 수 있는 controllable future generator의 방향을 제시한다.
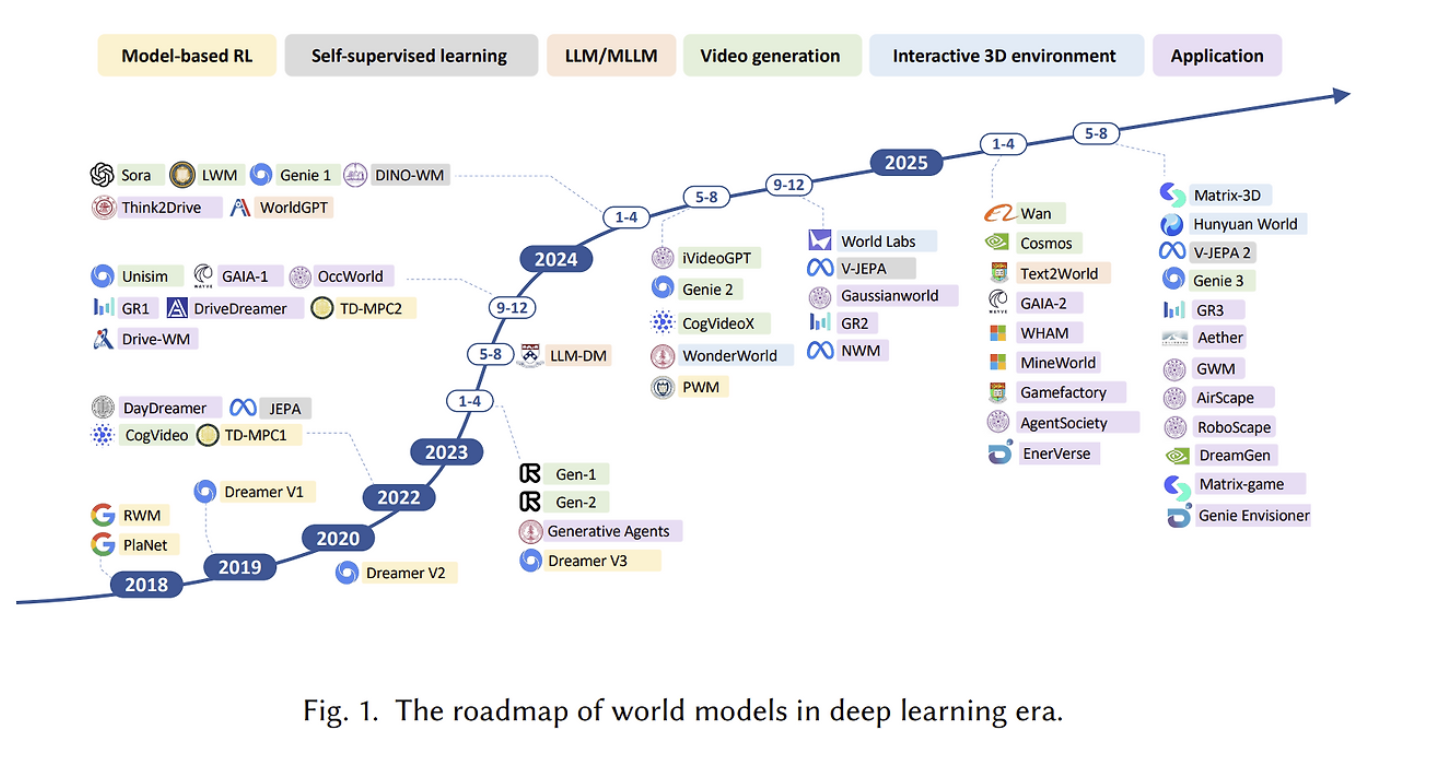
2023년 이후 world model 논의는 RL 내부의 latent dynamics model을 넘어, application-level video generation world model로 확장되고 있다. GAIA-1은 이 흐름에서 자율주행 video generation을 action/text-conditioned future prediction 문제로 연결한 사례다.
출처: Understanding World or Predicting Future? A Comprehensive Survey of World Models
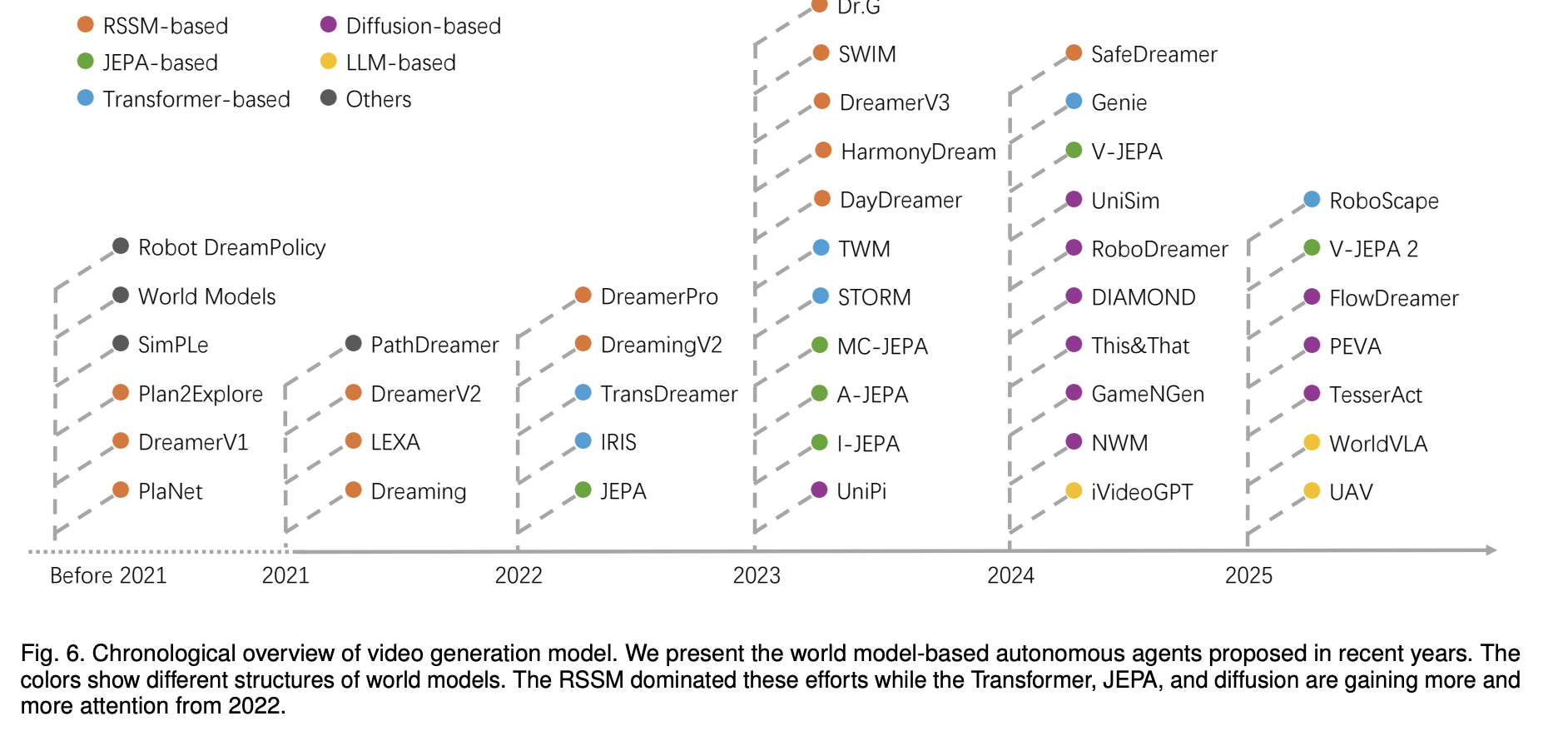
최근에는 Dreamer 계열의 RSSM처럼 latent dynamics를 recurrent하게 예측하는 방식만이 아니라, Transformer 기반 sequence modeling과 diffusion 기반 video generation이 world model 연구에서 더 큰 관심을 얻고 있다. 이 변화는 Sora 같은 비디오 생성 모델을 world simulator 관점에서 해석하려는 논의와도 이어진다.
출처: Is Sora a World Simulator? A Comprehensive Survey on General World Models and Beyond
이미지 설명: GAIA-1의 핵심 입력과 출력을 한 장으로 보여주는 overview이다. 과거 주행 video, text condition, ego action을 조건으로 받아 미래 driving video를 생성한다는 전체 문제 설정을 압축해서 보여준다.
1. GAIA-1은 어떤 문제를 풀려고 했나?¶
1.1 이 논문이 풀려고 한 문제¶
자율주행에서 어려운 점은 단순히 현재 장면을 인식하는 것이 아니다. 핵심은 다음 질문이다.
현재 도로 상황에서 내 차가 특정 행동을 하면, 앞으로 어떤 미래들이 가능할까?
수식으로 쓰면 다음과 같다.
| 기호 | 의미 |
|---|---|
| \(x_{\leq t}\) | 지금까지 본 주행 비디오 |
| \(a_{t:t+H}\) | 앞으로 ego-vehicle이 취할 action, 예: speed, curvature |
| \(c\) | text condition, 예: rainy night, red traffic light |
| \(x_{t+1:t+H}\) | 앞으로 생성될 미래 주행 비디오 |
즉 GAIA-1의 목표는 단순한 video generation이 아니라, action과 text에 의해 조절되는 미래 driving scenario 생성이다.
1.2 기존 접근의 한계¶
| 기존 흐름 | 장점 | 한계 |
|---|---|---|
| 기존 world model / model-based RL | 행동에 따른 미래 예측, planning에 유리 | 보통 low-dimensional latent 중심이라 고화질 주행 비디오 생성이 약함 |
| 기존 video generation | 시각적으로 그럴듯한 비디오 생성 | action-conditioned dynamics, 즉 “내가 이렇게 운전하면 미래가 어떻게 달라지나?”가 약함 |
GAIA-1은 이 둘을 합치려 한다.
World Model의 장점: 행동에 따른 미래 예측
+
Generative Video Model의 장점: 현실적인 비디오 생성
=
GAIA-1: Generative World Model for Autonomous Driving
1.3 핵심 아이디어¶
GAIA-1은 world modeling 문제를 다음처럼 바꾼다.
즉, 언어모델이 다음 단어를 예측하듯이 GAIA-1은 다음 image token을 예측한다.
여기서:
| 기호 | 의미 |
|---|---|
| \(z_i\) | image token |
| \(z_{<i}\) | 이전 image token들 |
| \(c\) | video context, action, text condition |
GAIA-1은 자율주행 세계를 GPT가 읽을 수 있는 token sequence로 바꾼 뒤, 다음 token을 예측하게 만든 모델이다.
2. 자율주행 세계를 token sequence로 바꾸자: Methods¶
2.1 전체 구조¶
Keyword: Tokenizer, Autoregressive Transformer, Diffusion Decoder
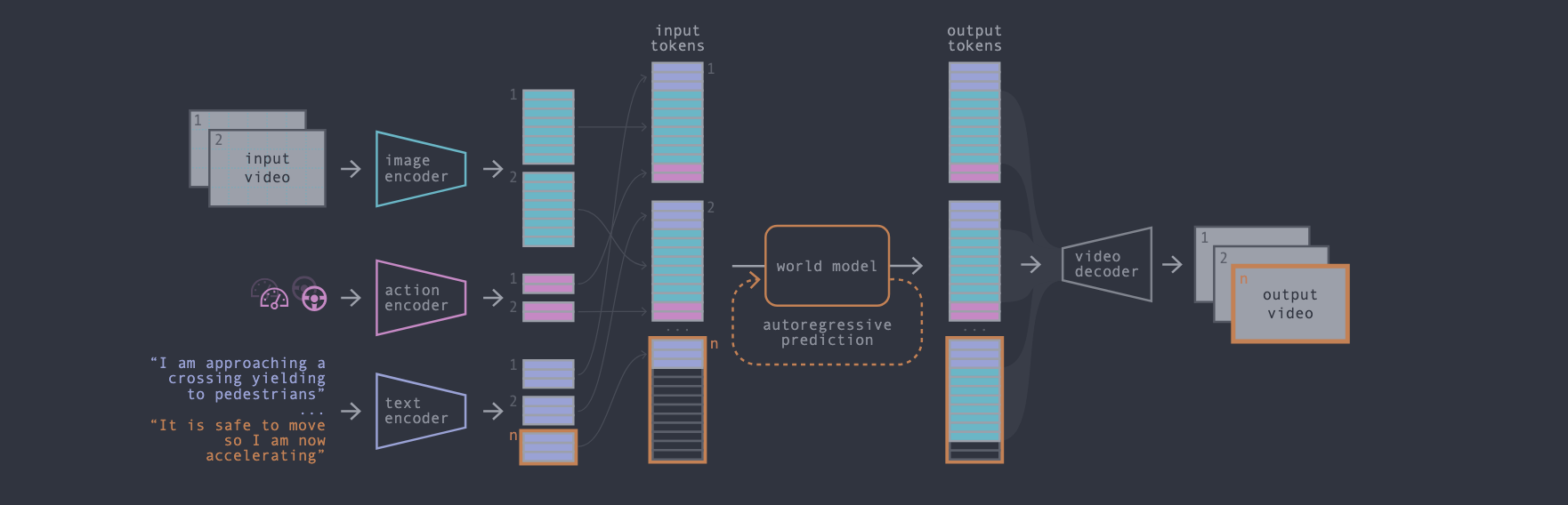
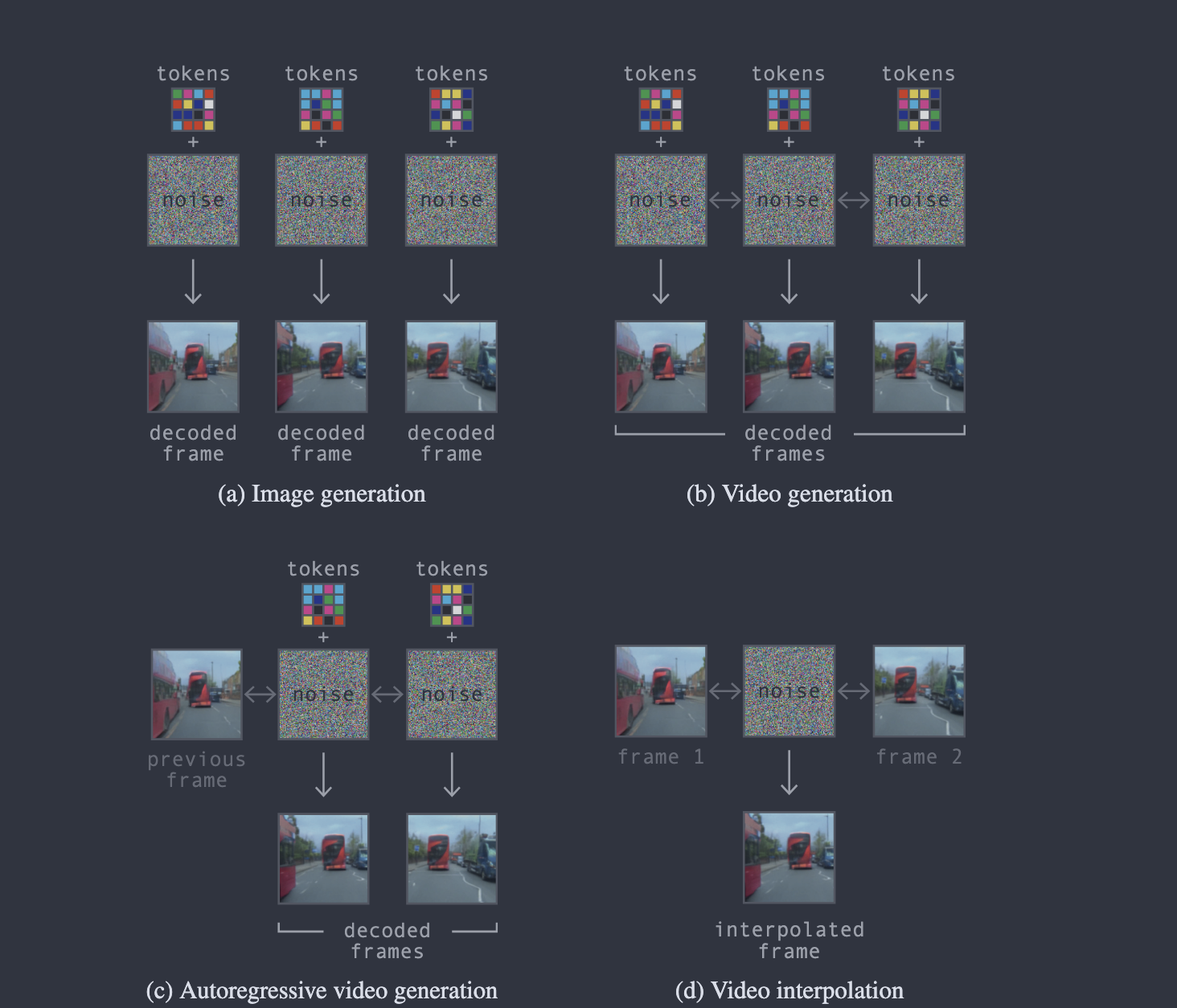
이미지 설명: GAIA-1의 전체 pipeline은 세 단계로 읽으면 된다. 먼저 video, text, action을 token sequence로 바꾸고, autoregressive Transformer가 미래 image token을 예측한다. 마지막으로 diffusion decoder가 예측된 token을 사람이 볼 수 있는 주행 비디오로 복원한다.
GAIA-1은 크게 3단계로 이해하면 된다.
flowchart LR
V[Past Video Frames] --> IT[Image Tokenizer<br/>discrete image tokens]
T[Text Prompt] --> TE[T5 Text Encoder<br/>text tokens]
A[Action<br/>speed / curvature] --> AE[Action Projection<br/>action tokens]
IT --> S[Interleaved Token Sequence<br/>text - image - action]
TE --> S
AE --> S
S --> WM[World Model<br/>Autoregressive Transformer]
WM --> FT[Future Image Tokens]
FT --> VD[Video Diffusion Decoder]
VD --> FV[Future Driving Video]핵심은 이거다.
| 구성요소 | 역할 | 리뷰 우선순위 |
|---|---|---|
| Image tokenizer | 주행 이미지를 discrete token으로 압축 | A |
| Text encoder | 텍스트 조건을 token으로 변환 | B |
| Action encoder | speed, curvature를 token representation으로 변환 | A |
| Autoregressive Transformer | 과거 token을 보고 다음 image token 예측 | A |
| Video diffusion decoder | 예측된 token을 고화질 비디오로 복원 | B |
2.2 Image Tokenizer¶
이미지를 픽셀 그대로 예측하면 너무 크고 복잡하다. 그래서 GAIA-1은 이미지를 discrete token으로 바꾼다.
언어 모델과 비교하면 다음과 같다.
| Language Model | GAIA-1 |
|---|---|
| 문장을 단어/token으로 나눔 | 이미지를 image token으로 나눔 |
| 다음 단어 예측 | 다음 image token 예측 |
| 문장 생성 | 미래 주행 비디오 생성 |
중요한 점은 image token이 단순한 픽셀 조각이 아니라, 차량, 도로, 하늘, 차선 같은 semantic structure를 담도록 유도된다는 점이다. GAIA-1은 DINO feature distillation을 사용해 token이 더 semantic한 정보를 담도록 만든다.
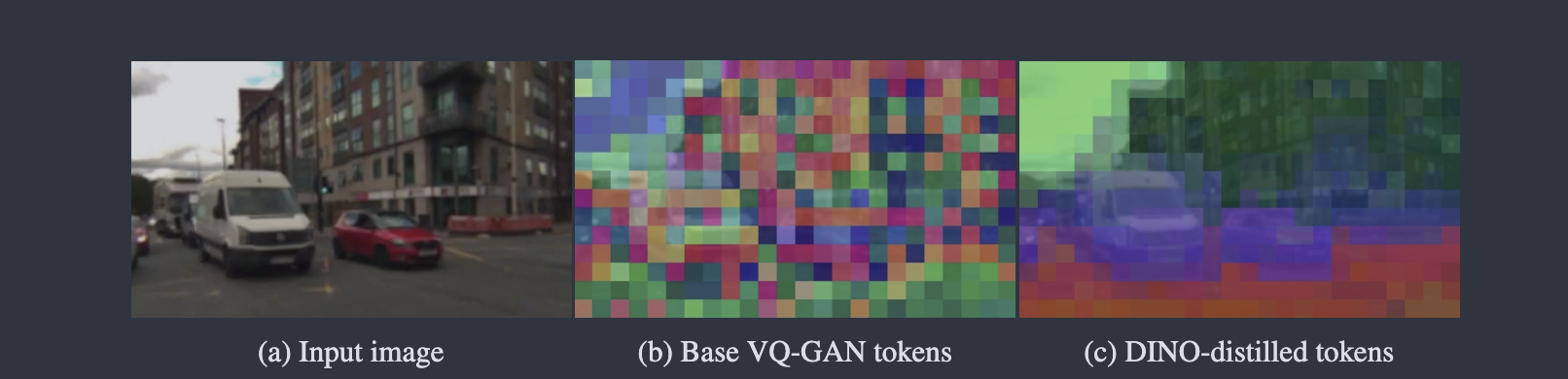
Keyword: Discrete Image Token, DINO Distillation, Semantic Representation
이미지 설명: 원본 이미지를 픽셀 그대로 예측하지 않고 discrete image token으로 압축하는 과정을 보여준다. DINO feature distillation을 통해 token이 단순한 색·질감보다 장면의 의미 구조를 더 잘 담도록 만든다.
2.3 Action-Conditioned Generation¶
GAIA-1이 단순 video generation과 다른 이유는 action condition이 들어간다는 점이다.
자율주행에서 action은 보통 다음과 같이 해석할 수 있다.
| Action | 의미 |
|---|---|
| speed | ego-vehicle의 속도 |
| curvature | ego-vehicle이 얼마나 휘어서 이동하는지, 즉 조향 방향 |
예시:
| 같은 현재 장면 | action | 생성되어야 하는 미래 |
|---|---|---|
| 로터리에 접근 중 | 직진 | 로터리를 지나 직진하는 영상 |
| 로터리에 접근 중 | 우회전 | 오른쪽 도로로 진입하는 영상 |
| 앞차에 접근 중 | 감속 | 앞차와 거리 유지 |
| 앞차에 접근 중 | 가속 | 앞차와 가까워짐 |
이 개념이 world model과 연결된다.
World model의 핵심은 “미래가 어떻게 될까?”가 아니라 “내가 이 행동을 하면 미래가 어떻게 될까?”이다.
2.4 Autoregressive Transformer¶
GAIA-1의 world model은 autoregressive Transformer다.
직관적으로 보면:
GAIA-1에서는:
수식으로 단순화하면:
| 항목 | 의미 |
|---|---|
| \(z_i^{img}\) | 예측해야 하는 현재 image token |
| \(z_{<i}^{img}\) | 이전 image token들 |
| \(z_{\leq i}^{text}\) | text condition |
| \(z_{\leq i}^{act}\) | action condition |
| \(\mathcal{L}_{WM}\) | 실제 다음 image token의 likelihood를 높이는 loss |
실제 주행 데이터에서 다음 image token을 잘 맞히도록 학습한다.
2.5 Video Diffusion Decoder¶
Transformer가 예측하는 것은 사람이 볼 수 있는 비디오가 아니라 image token이다.
이 token을 실제 비디오로 복원하기 위해 diffusion decoder를 사용한다.
Diffusion decoder는 노이즈를 점점 제거하면서 비디오를 복원하는 모델이라고 이해하면 된다.
간단한 diffusion training objective는 다음처럼 볼 수 있다.
| 기호 | 의미 |
|---|---|
| \(x\) | 실제 비디오 frame sequence |
| \(\epsilon\) | 추가한 노이즈 |
| \(x_\tau\) | 노이즈가 섞인 비디오 |
| \(z\) | image token condition |
| \(\epsilon_\phi\) | decoder가 예측한 노이즈 |
Transformer는 미래의 구조를 예측하고, diffusion decoder는 그 구조를 실제처럼 보이는 비디오로 렌더링한다.
Keyword: Video Diffusion Decoder, Reconstruction, High-quality Rendering
이미지 설명: decoder가 image token 조건을 받아 실제 비디오 frame sequence를 복원하도록 학습되는 방식을 보여준다. Transformer가 예측한 구조를 diffusion decoder가 시각적으로 자연스러운 주행 영상으로 렌더링하는 단계다.
2.6 GAIA-1 알고리즘 형태¶
Algorithm: GAIA-1 Future Video Generation
Input:
- context video frames x_{≤t}
- optional text prompt c
- future ego actions a_{t:t+H}
Step 1. Video frames를 image tokenizer로 discrete image tokens로 변환한다.
Step 2. Text prompt를 text tokens로 변환한다.
Step 3. Speed / curvature action을 action tokens로 변환한다.
Step 4. text - image - action 순서로 token sequence를 구성한다.
Step 5. Autoregressive Transformer가 다음 image token을 순서대로 예측한다.
Step 6. Top-k sampling으로 다양성과 안정성의 균형을 맞춘다.
Step 7. Video diffusion decoder가 예측된 image tokens를 pixel-space video로 복원한다.
Output:
- action/text 조건에 맞는 future driving video
3. 이전 world model / 생성형 모델 계열과의 연결¶
Dreamer 계열과 연결¶
Dreamer는 world model 안에서 imagined trajectory를 만들고, 그 상상 속 trajectory로 actor-critic을 학습한다.
| 비교 | Dreamer 계열 | GAIA-1 |
|---|---|---|
| 핵심 질문 | 상상 속에서 어떻게 더 좋은 행동을 배울까? | 행동 조건을 넣으면 어떤 미래 비디오가 생성될까? |
| world model 출력 | latent state, reward, continuation | future image tokens / video |
| 학습 목적 | policy improvement | controllable future video generation |
| planning/control | actor-critic 학습에 직접 연결 | neural simulator 가능성은 있지만 policy 학습은 직접 수행하지 않음 |
| 관측 복원 | representation 학습 신호로 사용 | 최종 결과물로 realistic video 생성 |
정리:
Dreamer는 “상상해서 행동을 배우는 모델”이고, GAIA-1은 “행동 조건을 넣어 미래 장면을 생성하는 모델”이다.
Trajectory Transformer 계열과 연결¶
Trajectory Transformer는 RL을 state/action/reward의 sequence modeling 문제로 본다.
GAIA-1도 유사하게 world modeling을 sequence modeling으로 바꾼다.
| 비교 | Trajectory Transformer | GAIA-1 |
|---|---|---|
| 데이터 단위 | state, action, reward trajectory | video, text, action tokens |
| 모델 | Transformer | Autoregressive Transformer |
| 생성 대상 | reward가 높은 trajectory | plausible future driving video |
| decoding | beam search planning | top-k sampling, text guidance, diffusion decoding |
| 핵심 연결 | RL을 sequence modeling으로 재해석 | world modeling을 next-token prediction으로 재해석 |
정리:
Trajectory Transformer가 “강화학습을 하나의 sequence modeling 문제로 보자”였다면, GAIA-1은 “자율주행 세계를 multimodal token sequence로 보자”이다.
JEPA 계열과 연결¶
JEPA 계열은 pixel을 직접 예측하기보다 representation space에서 미래 또는 가려진 부분을 예측하는 방향이다.
| 비교 | JEPA / V-JEPA | GAIA-1 |
|---|---|---|
| 핵심 철학 | pixel detail보다 abstract representation 예측 | raw pixel 대신 discrete image token 예측 |
| 생성형 여부 | 대체로 non-generative representation learning | generative video world model |
| 예측 공간 | learned representation / embedding space | discrete image token space + pixel video decoding |
| 장점 | semantic representation, sample efficiency | controllable future video generation |
| 공통점 | 픽셀을 직접 맞히는 부담을 줄임 | 픽셀 대신 압축 representation을 예측 |
정리:
JEPA는 “픽셀 말고 의미 표현을 예측하자”이고, GAIA-1은 “미래를 pixel이 아니라 discrete image token으로 예측한 뒤 diffusion으로 복원하자”이다.
4. 이 논문의 기여는 무엇인가?¶
4.1 핵심 기여¶
| 번호 | 기여 | 의미 |
|---|---|---|
| 1 | 자율주행 world modeling을 next-token prediction으로 재정의 | LLM식 scaling과 training objective를 자율주행 비디오에 적용 |
| 2 | video, text, action을 통합한 multimodal world model | 현재 장면뿐 아니라 action과 language로 미래를 제어 |
| 3 | autoregressive Transformer + video diffusion decoder 결합 | high-level dynamics와 high-quality rendering을 분리 |
| 4 | 대규모 실제 주행 데이터 기반 학습 | London driving data 4,700시간, 약 420M images 규모 |
| 5 | neural simulator 가능성 제시 | synthetic data, adversarial scenarios, validation에 활용 가능 |
4.2 이 논문이 새롭게 보여준 관점¶
기존에는 world model을 주로 이렇게 생각했다.
GAIA-1은 관점을 바꾼다.
이 전환이 중요한 이유는 다음과 같다.
| 관점 | 기존 world model | GAIA-1 |
|---|---|---|
| 목표 | control / planning | realistic future generation |
| 표현 | compact latent | discrete image tokens |
| 결과물 | policy 학습에 필요한 내부 상태 | 사람이 볼 수 있는 driving video |
| 평가 | reward, return, success rate | realism, controllability, scaling, qualitative capability |
5. Experiment¶
5.1 GAIA-1의 실험은 benchmark보다 capability 중심이다¶
GAIA-1의 실험은 RL benchmark 점수보다 주행 세계를 얼마나 그럴듯하게 예측하고 조작할 수 있는지를 보여주는 데 초점이 있다.
섹션 5는 세 가지 축으로 읽으면 된다.
- Data: 2019~2023년 런던 데이터로 충분히 크게 학습했는가?
- Scaling: next-token prediction world model에서도 scaling trend가 보이는가?
- Capabilities: long rollout, multiple futures, text/action control이 실제로 나타나는가?
5.2 Data Sampling¶
GAIA-1의 데이터 설정은 다음처럼 요약할 수 있다.
- 데이터: 2019~2023년 런던 데이터
- 규모: 약 4,700시간, 약 420M unique images
- 입력: 25Hz 주행 비디오
- 검증: 400시간 validation data + geofenced validation region
핵심은 데이터를 많이 쓰는 것만이 아니라, sampling distribution을 조절했다는 점이다. 논문은 latitude, longitude, weather category, steering behavior, speed behavior 등을 기준으로 sampling을 조정한다. 특정 지역이나 특정 날씨에 치우치면 모델이 주행 규칙을 배운 것이 아니라 자주 본 장면을 외울 수 있기 때문이다.
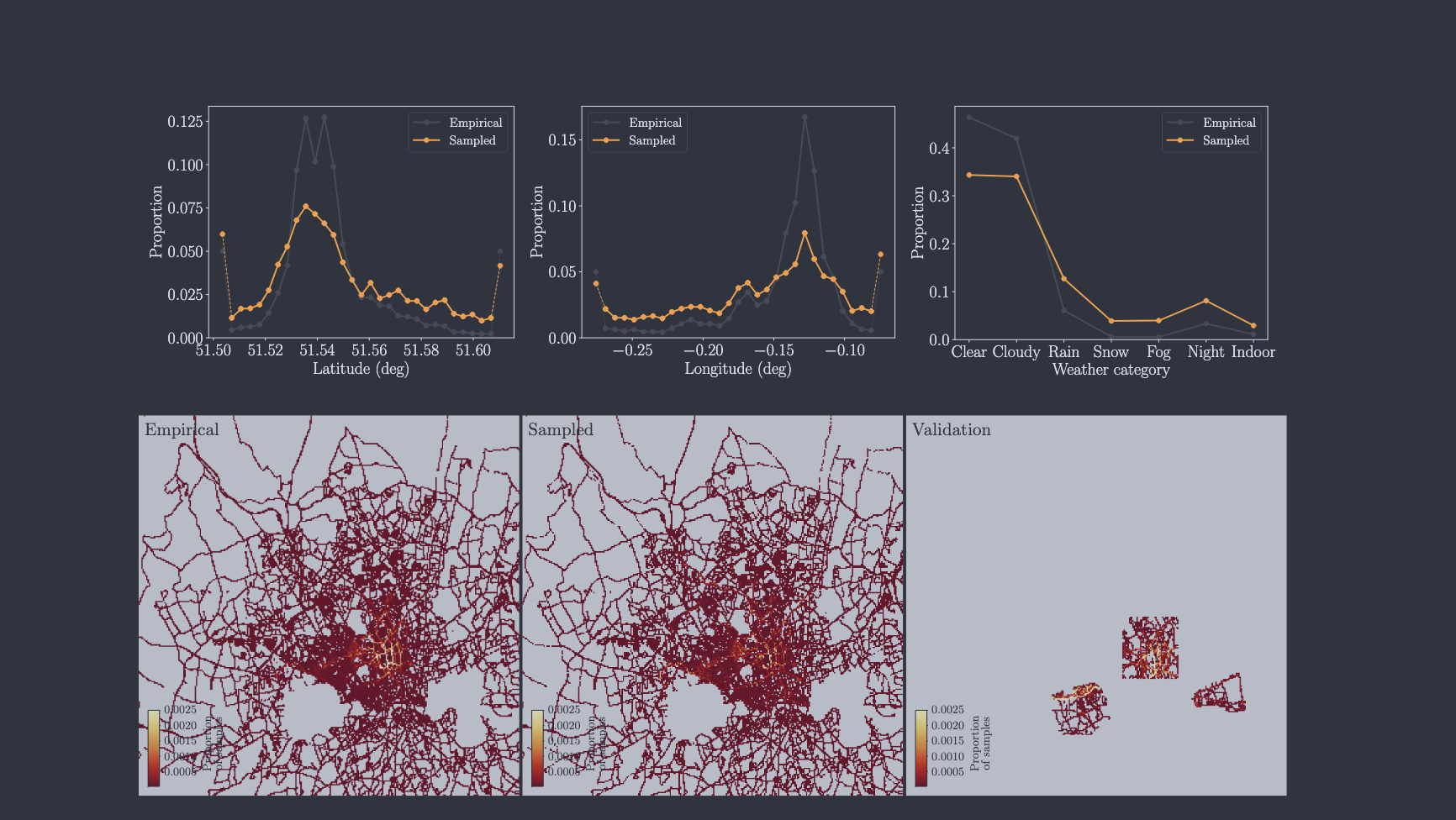
Figure 설명: 논문 Figure 5의 data sampling 그림이다. 위쪽은 latitude, longitude, weather에 대해 실제 데이터 분포와 sampling 후 분포를 비교하고, 아래쪽은 empirical / sampled / validation 좌표 heatmap을 보여준다. 즉, 학습 데이터의 지역·날씨 편향을 줄이고 geofenced validation을 따로 둔 설정을 보여준다.
5.3 Sampling Strategy와 Scaling¶
GAIA-1은 image token을 autoregressive하게 생성한다. 따라서 token을 어떻게 뽑는지가 중요하다.
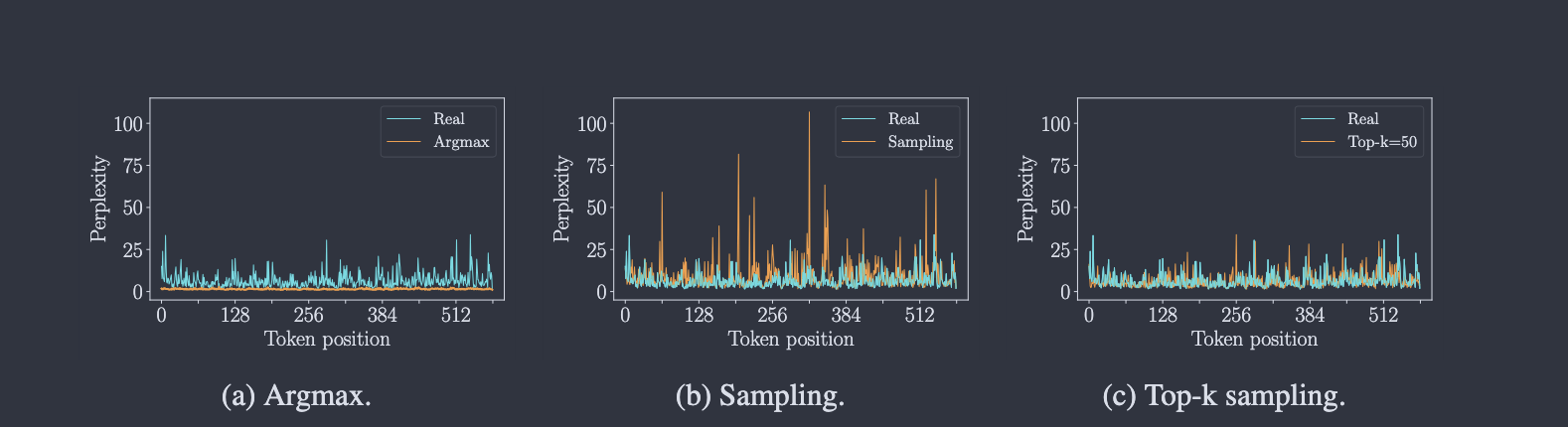
Figure 설명: 논문 Figure 6의 sampling strategy 비교다. Argmax는 perplexity가 너무 낮아 다양성이 사라지고, 전체 distribution에서 sampling하면 unreliable tail 때문에 perplexity spike가 생긴다. Top-k sampling은 real token과 더 비슷한 perplexity 분포를 만들어, 다양성과 안정성의 균형을 맞춘다.
Scaling 분석도 같은 맥락에서 읽으면 된다. GAIA-1은 future prediction을 discrete image token의 next-token prediction 문제로 바꾸었기 때문에, validation cross-entropy로 모델 크기에 따른 성능 변화를 볼 수 있다.
주의할 점은 이 지표가 driving score가 아니라는 것이다. Cross-entropy가 낮다는 것은 다음 image token을 더 잘 예측한다는 뜻이지, 곧바로 안전한 driving decision을 보장한다는 뜻은 아니다.
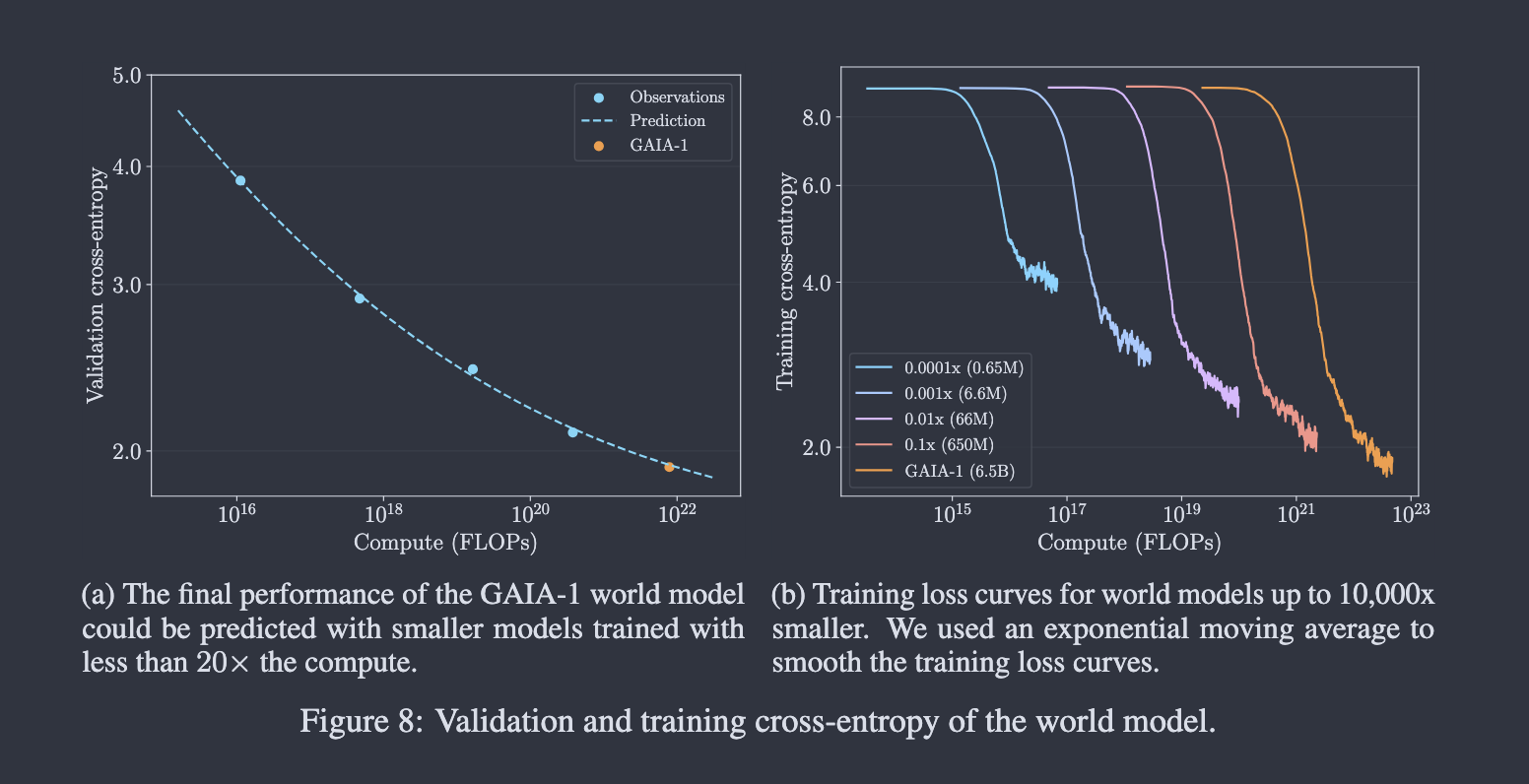
Figure 설명: 논문 Figure 8의 scaling 분석이다. 작은 모델들의 validation cross-entropy를 power-law로 맞추어 6.5B 규모 GAIA-1 world model의 최종 loss를 예측한다. 오른쪽은 모델 규모별 training cross-entropy curve를 보여준다.
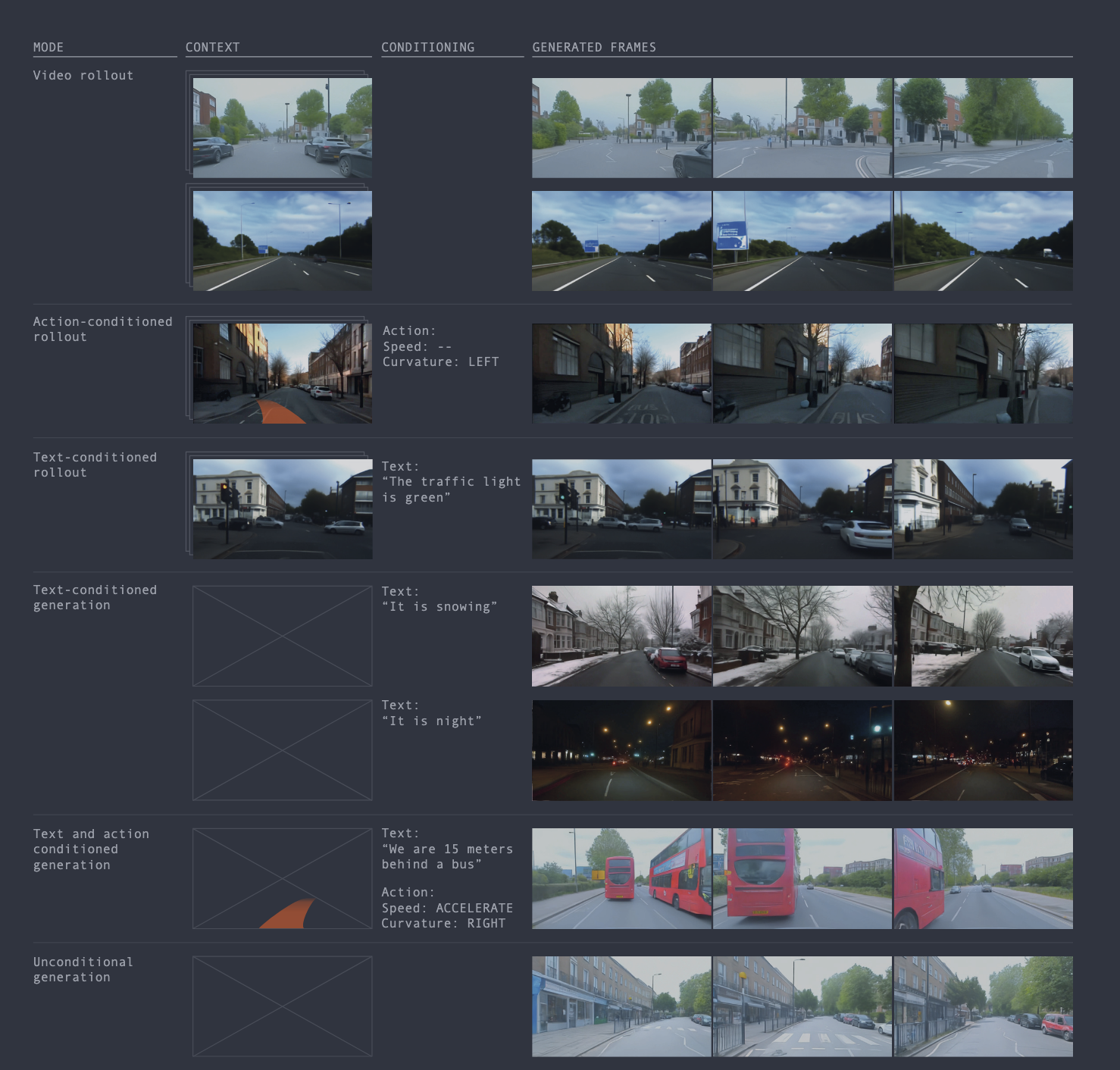
5.4 Qualitative Capabilities: 생성 결과에서 확인한 능력¶
GAIA-1의 qualitative experiment는 모델이 단순히 그럴듯한 frame을 만드는지보다, 주행 세계의 구조와 동역학을 어느 정도 담고 있는지를 보여준다.
Long driving scenario.
짧은 clip이 아니라 몇 분 길이의 imagined driving video를 생성한다. 도로 구조, 차량 위치, 건물 같은 요소가 시간에 따라 유지되는지가 핵심이다.

Figure 설명: GAIA-1이 완전히 상상한 주행 장면을 긴 시간 동안 이어서 생성하는 예시다. 장기 rollout에서 장면의 구조와 움직임이 크게 무너지지 않는지를 확인하는 Figure다.
Multiple plausible futures.
같은 초기 context에서도 여러 미래가 가능하다. GAIA-1은 repeated sampling으로 하나의 정답 미래가 아니라 가능한 미래들의 분포를 생성한다.
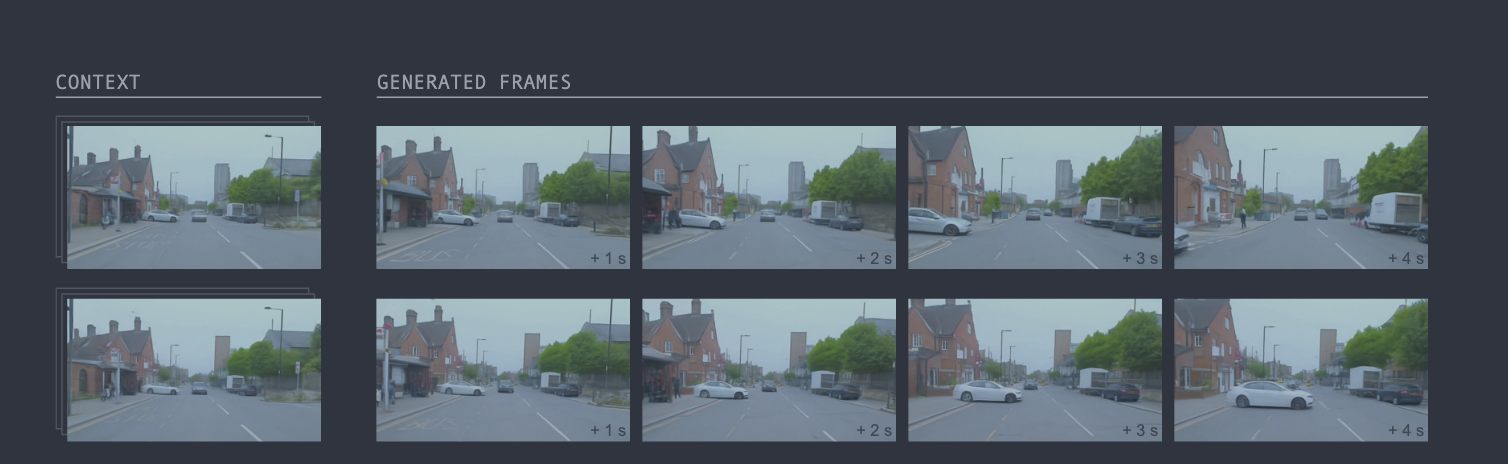
Figure 설명: 같은 context에서 서로 다른 plausible future가 생성되는 예시다. 이 Figure는 GAIA-1이 deterministic predictor가 아니라 multimodal future를 다루는 generative world model이라는 점을 보여준다.
Text-conditioned generation.
Text prompt로 날씨, 조명, 장면 속성을 바꾼다. 이는 GAIA-1이 language condition을 통해 scene attribute를 제어할 수 있음을 보여준다.

Figure 설명: text prompt를 바꾸어 weather와 illumination 같은 scene attribute를 조절하는 예시다. 주행 맥락은 유지하면서 시각적 조건을 바꿀 수 있는지를 보여준다.
Action-conditioned generation.
Speed와 curvature 같은 ego action 조건을 바꾸면 미래 장면도 달라진다. 이 부분이 GAIA-1을 일반 video generation이 아니라 world model에 가깝게 만든다.

Figure 설명: ego vehicle의 steering/action 조건을 바꾸면 생성되는 미래도 달라지는 예시다. 논문은 out-of-distribution 행동에서도 도로 geometry와 주변 차량의 반응이 비교적 일관되게 나타나는 사례를 보여준다.
6. 결론과 한계¶
6.1 논문 결론¶
GAIA-1의 결론은 다음과 같이 정리할 수 있다.
자율주행 world model을 LLM식 next-token prediction 문제로 바꾸고, diffusion decoder를 결합하면, action과 text로 제어 가능한 realistic driving video simulator를 만들 수 있다.
6.2 이 논문에서 가져갈 핵심 메시지¶
| 핵심 메시지 | 설명 |
|---|---|
| World model의 범위가 넓어지고 있다 | 이제 world model은 reward/state 예측뿐 아니라 realistic video generation까지 포함 |
| 생성형 모델과 RL/world model이 만난다 | next-token prediction, Transformer, diffusion이 자율주행 world model에 사용됨 |
| action conditioning이 중요하다 | 그냥 그럴듯한 영상이 아니라 “행동에 따른 미래”를 생성해야 world model에 가까움 |
| representation choice가 중요하다 | pixel을 직접 예측하지 않고 discrete token을 예측함 |
| 아직 policy 논문은 아니다 | neural simulator 가능성을 보여주지만 closed-loop agent는 아님 |
6.3 한계¶
| 한계 | 설명 |
|---|---|
| Real-time inference 아님 | autoregressive generation이 계산량이 큼 |
| Closed-loop policy evaluation 부족 | 실제 driving decision 성능과 직접 연결되지는 않음 |
| Single-camera 중심 | 완전한 surround multi-camera simulator는 아님 |
| 정량 safety metric 부족 | 생성 품질이 안전성으로 이어지는지 별도 검증 필요 |
| 학습 데이터 편향 가능성 | London driving data 중심이므로 지역 일반화는 추가 검증 필요 |
7. 최종 요약표¶
| 항목 | 정리 |
|---|---|
| 논문 한 문장 | GAIA-1은 video/text/action 조건으로 미래 주행 비디오를 생성하는 generative world model이다. |
| 문제 | 자율주행에서는 ego action에 따라 달라지는 여러 가능한 미래를 예측해야 한다. |
| 해결 | image tokenization + autoregressive Transformer + video diffusion decoder |
| 핵심 수식 | \(p(x_{t+1:t+H} \mid x_{\leq t}, a_{t:t+H}, c)\) |
| Dreamer 연결 | world model 기반 imagination이지만, policy learning이 아니라 video generation 중심 |
| Trajectory Transformer 연결 | RL/world modeling을 sequence modeling 문제로 바꾸는 흐름 |
| JEPA 연결 | pixel 대신 representation/token을 예측한다는 철학 |
| 실험 성격 | scaling + qualitative capabilities 중심 |
| 기여 | 자율주행 world model을 multimodal next-token prediction + video diffusion으로 구현 |
| 한계 | real-time 아님, closed-loop policy 검증 부족, safety metric 부족 |
8. 후속 흐름: GAIA-2와 GAIA-3는 무엇이 다르고, 왜 달라졌나?¶
핵심은 GAIA-2 = 더 잘 제어되는 multi-camera synthetic world, GAIA-3 = 안전성 평가/검증에 쓸 수 있는 repeatable world로 기억하면 된다.
8.1 한 줄 흐름¶
GAIA-1
video + text + action으로 미래 주행 비디오를 생성할 수 있음을 보여줌
↓
GAIA-2
multi-camera, structured conditioning, latent diffusion으로
더 현실적이고 제어 가능한 주행 시뮬레이션을 만듦
↓
GAIA-3
생성된 세계를 단순 합성 데이터가 아니라
자율주행 모델의 safety evaluation / what-if test에 사용
GAIA-2는 “자율주행용 영상을 더 잘 만들자”이고, GAIA-3는 “그 생성 세계로 자율주행 모델을 더 잘 시험하자”이다.
8.2 GAIA-2: 더 제어 가능한 multi-camera world model¶
GAIA-1은 action/text-conditioned future video generation의 가능성을 보여줬지만, 실제 자율주행 시스템에 바로 쓰기에는 몇 가지 한계가 있었다. 실제 차량은 single-camera가 아니라 여러 카메라를 동시에 사용하고, 장기 생성에서는 temporal smoothness가 중요하며, 도로 구조·agent·날씨·지역 같은 조건을 더 세밀하게 제어해야 한다.
그래서 GAIA-2는 GAIA-1의 AR discrete image token + diffusion decoder 흐름에서, continuous video latent + latent diffusion world model 쪽으로 이동한다. 핵심은 단순히 더 예쁜 비디오를 만드는 것이 아니라, 자율주행 모델 학습과 검증에 필요한 조건을 구조적으로 바꿀 수 있는 synthetic scenario generator를 만드는 것이다.
정리하면 GAIA-2의 변화는 다음 세 가지다.
- 표현: discrete image token 중심에서 continuous video latent로 이동한다.
- 시야: single/few-view 중심에서 multi-camera generation으로 확장한다.
- 조건 제어: text/action뿐 아니라 ego dynamics, 3D agents, road semantics, weather, time, region, camera geometry를 더 명시적으로 다룬다.
8.3 GAIA-3: 생성 세계를 평가 도구로 바꾸기¶
GAIA-2가 “더 잘 제어되는 synthetic driving world를 만들자”에 가까웠다면, GAIA-3는 목적을 더 실용적인 방향으로 옮긴다. 핵심은 생성형 world model을 offline safety evaluation suite로 사용하는 것이다.
자율주행 평가는 어렵다. 실제 도로 테스트는 필요하지만 위험 상황은 드물고, rare safety case를 의도적으로 재현하기도 어렵다. GAIA-3는 같은 실제 주행 seed scene을 유지한 채 ego trajectory나 visual condition을 바꾸어, what-if / counterfactual test를 반복 가능하게 만들려 한다.
GAIA-3에서 중요한 기능은 다음처럼 요약할 수 있다.
- Safety-critical scenario generation: 충돌, near-miss, 차선 이탈 같은 위험 상황을 생성한다.
- World-on-rails evaluation: 원본 장면의 구조를 유지하면서 ego 행동만 바꾸어 비교한다.
- Embodiment transfer: 같은 장면을 다른 차량 또는 카메라 rig 관점으로 다시 렌더링한다.
- Controlled visual diversity: motion과 구조는 유지하고 날씨, 조명, 텍스처를 바꾸어 robustness를 본다.
즉 GAIA-3는 “아무 장면이나 생성하는 모델”보다, 자율주행 모델을 반복 가능하게 시험하기 위한 통제된 world model에 가깝다.
8.4 GAIA-1 → GAIA-2 → GAIA-3 발전 방향¶
flowchart LR
G1[GAIA-1<br/>Action/Text-conditioned<br/>future video generation]
G2[GAIA-2<br/>Controllable multi-camera<br/>latent diffusion world model]
G3[GAIA-3<br/>Safety evaluation<br/>world-on-rails what-if tests]
G1 -->|더 현실적이고 제어 가능한 synthetic world 필요| G2
G2 -->|생성된 세계를 실제 평가/검증에 연결할 필요| G3| 전환 | 달라진 점 | 왜 달라졌나? |
|---|---|---|
| GAIA-1 → GAIA-2 | AR discrete token 중심에서 continuous latent diffusion + multi-camera로 이동 | 실제 자율주행 입력은 multi-camera이고, 장기 생성의 temporal smoothness와 조건 제어가 중요하기 때문 |
| GAIA-2 → GAIA-3 | synthetic scenario generation에서 structured offline evaluation으로 이동 | 자율주행 모델이 좋아질수록 실제 도로에서 의미 있는 failure를 찾기 어렵고, rare safety case를 반복 가능하게 시험해야 하기 때문 |
참고문헌 / 출처¶
-
Anthony Hu et al., GAIA-1: A Generative World Model for Autonomous Driving, arXiv:2309.17080, 2023.
https://arxiv.org/abs/2309.17080 -
ar5iv HTML version of GAIA-1: A Generative World Model for Autonomous Driving.
https://ar5iv.labs.arxiv.org/html/2309.17080 -
Jingtao Ding et al., Understanding World or Predicting Future? A Comprehensive Survey of World Models, arXiv:2411.14499, 2024.
https://arxiv.org/abs/2411.14499 -
Zheng Zhu et al., Is Sora a World Simulator? A Comprehensive Survey on General World Models and Beyond, arXiv:2405.03520, 2024.
https://arxiv.org/abs/2405.03520 -
Wayve, Scaling GAIA-1: 9-billion parameter generative world model for autonomous driving, 2023.
https://wayve.ai/thinking/scaling-gaia-1/ -
Danijar Hafner et al., Mastering Diverse Domains through World Models, arXiv:2301.04104, 2023.
https://arxiv.org/abs/2301.04104 -
Michael Janner, Qiyang Li, Sergey Levine, Offline Reinforcement Learning as One Big Sequence Modeling Problem, arXiv:2106.02039, 2021.
https://arxiv.org/abs/2106.02039 -
Mahmoud Assran et al., Self-Supervised Learning from Images with a Joint-Embedding Predictive Architecture, arXiv:2301.08243, 2023.
https://arxiv.org/abs/2301.08243 -
Meta AI, V-JEPA: The next step toward advanced machine intelligence, 2024.
https://ai.meta.com/blog/v-jepa-yann-lecun-ai-model-video-joint-embedding-predictive-architecture/ -
Lloyd Russell et al., GAIA-2: A Controllable Multi-View Generative World Model for Autonomous Driving, arXiv:2503.20523, 2025.
https://arxiv.org/abs/2503.20523 -
ar5iv HTML version of GAIA-2: A Controllable Multi-View Generative World Model for Autonomous Driving.
https://ar5iv.labs.arxiv.org/html/2503.20523v1 -
Wayve, GAIA-2: Pushing the Boundaries of Video Generative Models for Safer Assisted and Automated Driving, 2025.
https://wayve.ai/thinking/gaia-2/ -
Wayve, GAIA-3: Scaling World Models to Power Safety and Evaluation, 2025.
https://wayve.ai/thinking/gaia-3/ -
Wayve, Wayve launches GAIA-3, advancing world models from simulation to evaluation, 2025.
https://wayve.ai/press/wayve-launches-gaia3/