Dream to Control: Learning Behaviors by Latent Imagination (Dreamer)¶
Information
- Title: Dream to Control: Learning Behaviors by Latent Imagination (Dreamer)
- Venue: ICLR 2020
- Paper: arXiv
- Code: Homepage
- Presenter: Juyeon Kim
- Last updated: 2026-04-07
Background¶
Dreamer는 강화학습(reinforcement learning), 월드 모델(world model), 잠재 공간(latent space), 부분 관측 마르코프 결정 과정(POMDP) 같은 개념이 한 번에 등장하는 논문이다. 처음 읽으면 용어가 많아 보이지만, 핵심 질문은 단순하다.
에이전트가 실제 환경에서 계속 부딪혀 보지 않고, 자기 머릿속에서 미래를 상상하며 더 똑똑하게 배울 수 있는가?
Dreamer는 이 질문에 대해, 그렇다. 다만 픽셀 공간이 아니라 압축된 잠재 공간에서 상상해야 한다고 답한다.
강화학습(reinforcement learning)이란 무엇인가¶
강화학습은 행동을 해 보고, 그 결과로 받은 보상(reward)을 바탕으로 더 좋은 행동 규칙을 배우는 방법이다. 게임으로 비유하면, 화면을 보고 버튼을 누르고, 점수를 얻으며, 점수를 많이 주는 플레이 방식을 익히는 과정과 같다.
flowchart LR
E["환경 (environment)"] -->|"관측 (observation), 보상 (reward)"| A["에이전트 (agent)"]
A -->|"행동 (action)"| E강화학습의 기본 목표는 누적 보상의 기대값을 크게 만드는 것이다.
여기서 \(r_t\)는 \(t\)시점의 보상이다. 에이전트는 당장 눈앞의 보상만이 아니라, 앞으로 계속 받을 보상까지 함께 고려해야 한다.
모델 프리(model-free)와 모델 기반(model-based)¶
| 구분 | 모델 프리(model-free) | 모델 기반(model-based) |
|---|---|---|
| 무엇을 배우는가 | 정책(policy), 가치(value) | 정책과 함께 환경의 변화 규칙 |
| 장점 | 구조가 단순하다 | 적은 실제 데이터로도 배울 수 있다 |
| 단점 | 데이터가 많이 든다 | 환경 모델이 틀리면 잘못 배울 수 있다 |
| Dreamer와의 관계 | 해당하지 않는다 | Dreamer는 여기에 속한다 |
Dreamer는 환경이 어떻게 변하는지 예측하는 월드 모델을 먼저 배우고, 그 모델 안에서 정책을 학습한다.
MDP와 POMDP¶
논문은 시각 제어(visual control)를 부분 관측 마르코프 결정 과정(POMDP) 으로 둔다. 이유는 에이전트가 환경의 실제 상태(state)를 직접 보지 못하고, 카메라 이미지 같은 관측(observation)만 보기 때문이다.
예를 들어, 로봇 팔의 사진 한 장만 보고는 그 팔이 지금 얼마나 빠르게 움직이는지 완전히 알기 어렵다. 그래서 현재 관측만으로는 진짜 상태를 다 알 수 없는 상황이 생긴다. 이것이 POMDP이다.
논문의 문제 설정은 다음과 같다.
여기서 \(o_t\)는 관측, \(a_t\)는 행동, \(r_t\)는 보상이다. 핵심은 에이전트가 이미지 이력과 행동 이력을 바탕으로 미래 보상을 크게 만드는 행동을 골라야 한다는 점이다.
월드 모델(world model)이란 무엇인가¶
월드 모델은 한마디로 세상이 어떻게 변하는지에 대한 내부 시뮬레이터이다. 사람으로 비유하면, “내가 지금 오른쪽으로 뛰면 공이 저쪽으로 갈 것 같다”라고 머릿속으로 미리 그려보는 능력과 비슷하다.
Dreamer의 월드 모델은 픽셀 전체를 그대로 다루지 않는다. 대신 이미지를 압축한 잠재 상태(latent state) 를 사용한다. 이렇게 하면 계산이 훨씬 가벼워지고, 수천 개의 미래 경로를 병렬로 상상할 수 있다.
왜 잠재 공간(latent space)이 중요한가¶
픽셀 공간(pixel space)에서 미래 이미지를 직접 예측하면 계산량이 크고 오차가 쉽게 커진다. Dreamer는 이미지를 작은 벡터로 바꾼 뒤 그 벡터 공간 안에서 미래를 예측한다. 이 작은 벡터 공간이 잠재 공간이다.
flowchart LR
O["고차원 이미지 관측"] --> R["표현 모델 / representation model"]
R --> S["잠재 상태 / latent state"]
S --> T["전이 모델 / transition model"]
T --> NS["다음 잠재 상태"]
NS --> RW["보상 모델 / reward model"]핵심은 다음과 같다.
- 이미지를 잠재 상태로 압축한다.
- 잠재 상태에서 미래를 예측한다.
- 그 상상된 미래를 이용해 행동 규칙을 배운다.
Dreamer를 읽기 위한 핵심 용어¶
| 용어 | 쉬운 뜻 |
|---|---|
| 정책(policy) | 어떤 상황에서 어떤 행동을 할지 정하는 규칙이다 |
| 가치(value) | 지금 상태가 미래까지 봤을 때 얼마나 좋은지 나타내는 점수다 |
| 액터(actor) | 행동을 고르는 모델이다 |
| 크리틱(critic) | 상태의 가치를 평가하는 모델이다 |
| 마르코프(Markov) | 현재 상태만 알면 미래 예측에 필요한 과거 정보가 충분히 요약되었다는 뜻이다 |
| 잠재 상태(latent state) | 이미지를 압축해서 얻은, 학습된 내부 상태 벡터다 |
| 상상 지평(imagination horizon) | 월드 모델이 몇 단계 앞까지 상상할지 정한 길이다 |
| 벨만 일관성(Bellman consistency) | 현재 가치가 ‘지금 보상 + 다음 상태의 가치’와 맞아야 한다는 원리다 |
| 재매개변수화(reparameterization) | 샘플링된 확률적 행동도 미분 가능한 형태로 바꾸어 학습하는 기법이다 |
| ELBO | 생성 모델을 학습할 때 자주 쓰는 변분 하한(variational lower bound)이다 |
| RSSM | 순환 상태 공간 모델(recurrent state-space model)로, Dreamer의 핵심 잠재 동역학 모델이다 |
Summary¶
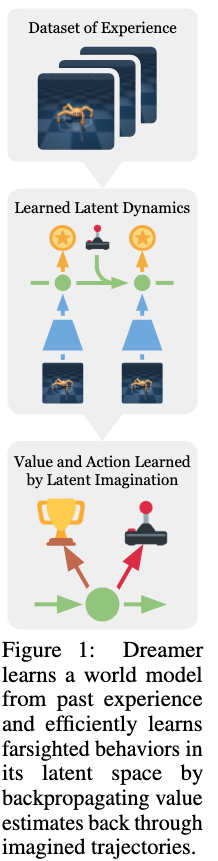
Dreamer는 이미지 입력만 보고 장기적인 행동(long-horizon behavior)을 학습하는 모델 기반 강화학습 에이전트이다. 이 논문의 핵심은, 실제 환경에서 수없이 시행착오를 하는 대신, 학습된 월드 모델 안에서 잠재 상태를 따라 미래를 상상하고, 그 상상된 궤적을 이용해 정책과 가치를 함께 학습한다는 점이다.
이때 Dreamer는 단순히 짧은 미래 보상만 더하지 않는다. 상상 지평(imagination horizon) 너머의 보상까지 가치 모델(value model)로 추정한다. 그래서 눈앞의 점수만 쫓는 근시안적 행동을 줄이고, 장기 보상을 노리는 행동을 배울 수 있다.
또한 Dreamer는 온라인 계획(online planning)처럼 매 순간 최적 행동을 새로 찾지 않고, 배운 행동 모델(action model)을 직접 실행한다. 즉, PlaNet처럼 매번 계획을 세우는 방식보다 실행이 빠르면서도, 월드 모델을 통과하는 해석적 기울기(analytic gradient) 를 써서 정책을 효율적으로 학습한다.
실험에서는 DeepMind Control Suite의 20개 시각 제어 과제에서 Dreamer가 데이터 효율성(data-efficiency), 계산 시간(computation time), 최종 성능(final performance) 에서 기존 방법을 크게 앞선다. 특히 평균 점수는 5 × 10^6 환경 스텝만으로 823.39를 기록하며, 같은 논문에서 재실행한 PlaNet의 332.97을 크게 넘고, 10^8 스텝을 사용한 강한 모델 프리 기준선 D4PG의 786.32도 앞선다.
Key Contributions¶
1. 잠재 상상(latent imagination)만으로 장기 행동을 학습한다¶
기존의 많은 모델 기반 강화학습은 짧은 상상 구간 안의 보상만 최적화하거나, 미분 없는 계획(derivative-free planning)에 의존했다. Dreamer는 잠재 공간에서 상상된 궤적을 따라 가치 기울기(value gradient)를 뒤로 전파하여 정책을 직접 학습한다. 이것이 이 논문의 가장 큰 공헌이다.
2. 유한한 상상 지평의 한계를 가치 모델로 넘는다¶
상상은 보통 \(H\)단계까지만 한다. 그런데 그 이후의 보상을 무시하면 장기 과제에서 쉽게 근시안적으로 된다. Dreamer는 상태 가치(state value)를 함께 예측하여, 상상 지평 너머의 미래를 요약한다. (Figure 4와 Figure 7에서 이 장치가 장기 과제에서 결정적으로 중요함을 보여줌)
3. 월드 모델의 미분 가능성을 실제로 활용한다¶
신경망 동역학(neural network dynamics)을 쓰면 모델 내부를 따라 미분이 흐를 수 있다. Dreamer는 이 장점을 살려 행동, 상태, 보상, 가치 예측 전체를 하나의 미분 가능한 계산 그래프로 묶는다. 그래서 무작위 후보 행동을 많이 던져보는 방식보다 더 직접적으로 정책을 업데이트한다.
4. 표현 학습(representation learning)과 행동 학습을 느슨하게 결합한다¶
Dreamer는 특정한 한 표현 학습만 강제하지 않는다. 논문은 보상 예측(reward prediction), 픽셀 재구성(reconstruction), 대조 추정(contrastive estimation) 세 가지를 비교한다. 이 구조 덕분에 나중에 더 좋은 표현 학습이 나오면 Dreamer 위에 그대로 얹기 쉽다.
5. 같은 하이퍼파라미터(hyperparameter)로 많은 과제를 푼다¶
논문은 연속 제어(continuous control) 20개 과제에 대해 같은 하이퍼파라미터를 사용한다. 이는 실험 결과가 특정 과제 튜닝에 크게 의존하지 않음을 보여주는 장점이다.
Method¶
1. 전체 구조¶
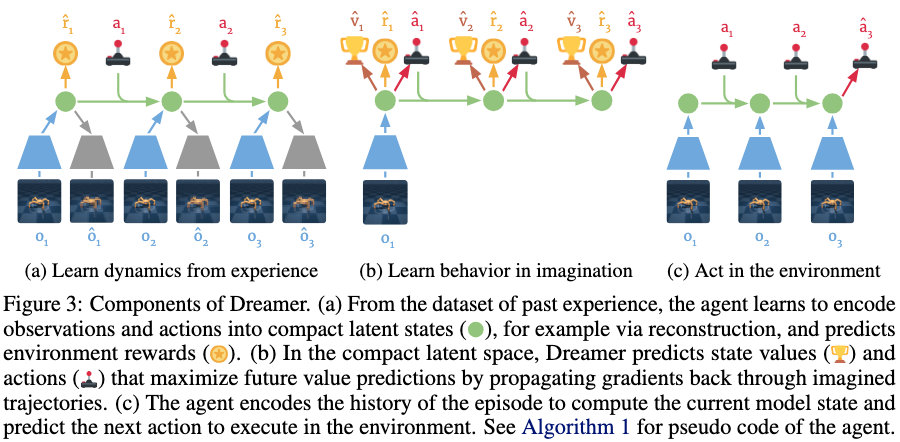
Dreamer의 전체 흐름은 Figure 1, Figure 3, Algorithm 1로 요약된다.
이 구조를 간략히 시각화로 보이면 다음과 같다.
flowchart TD
D["경험 데이터셋 D"] --> WM["월드 모델 학습 / 표현 모델 + 전이 모델 + 보상 모델"]
WM --> S["실제 경험에서 얻은 잠재 상태 s_t"]
S --> IM["잠재 상상 (latent imagination) / s_tau → a_tau → s_tau+1"]
IM --> AV["행동 모델 (action model) / 가치 모델 (value model) 학습"]
AV --> ACT["환경에서 행동 실행"]
ACT --> D이 구조를 말로 풀면 다음과 같다.
- 먼저 실제 환경에서 데이터를 모은다.
- 그 데이터로 월드 모델을 학습한다.
- 실제 데이터에서 출발한 잠재 상태로부터 미래를 상상한다.
- 상상된 미래 위에서 행동 모델과 가치 모델을 학습한다.
- 학습된 행동 모델을 실제 환경에서 실행하여 데이터를 더 모은다.
이 다섯 단계가 계속 반복된다.
2. 문제 설정: 시각 제어를 POMDP로 본다¶
Dreamer는 이미지 기반 제어를 POMDP로 둔다. 현실의 진짜 상태는 직접 보이지 않고, 이미지와 보상만 들어오기 때문이다. 이는 월드 모델이 왜 필요한지 바로 보여준다. 현재 이미지 한 장만으로 부족한 정보를, 잠재 상태가 과거를 요약하여 보충해야 하기 때문이다.
3. 잠재 동역학(latent dynamics) 모델¶
논문은 Dreamer의 월드 모델을 세 부분으로 나눈다.
이 세 식은 각각 다음 뜻을 가진다.
- 표현 모델(representation model) 은 현재 관측 \(o_t\)와 직전 잠재 상태 및 행동을 보고 현재 잠재 상태 \(s_t\)를 만든다.
- 전이 모델(transition model) 은 관측을 다시 보지 않고도, 현재 잠재 상태와 행동으로 다음 잠재 상태를 예측한다.
- 보상 모델(reward model) 은 잠재 상태가 얼마나 좋은지, 즉 보상이 얼마일지를 예측한다.
논문은 현실에서 데이터를 생성하는 분포를 주로 \(p\)로, 상상을 가능하게 하는 근사 분포를 주로 \(q\)로 표기한다. Dreamer의 핵심은 이미지 자체를 상상하지 않고 잠재 상태만 상상한다는 점이다. 그래서 메모리를 적게 쓰고, 많은 미래 궤적을 빠르게 계산할 수 있다.
논문은 이 구조가 비선형 칼만 필터(non-linear Kalman filter), 잠재 상태 공간 모델(latent state space model), 실수 상태를 갖는 HMM과 닮았다고 설명한다. 쉬운 말로 하면, “현재까지 본 것을 요약한 내부 상태를 두고, 그 상태가 시간에 따라 어떻게 바뀌는지 배운다”는 뜻이다.
4. 상상 환경(imagination environment)¶
Dreamer는 잠재 상태가 마르코프적이라고 가정한다. 그래서 잠재 상태 위에서는 완전 관측 MDP처럼 다룰 수 있다. 논문은 실제 시간 \(t\)와 구별하기 위해, 상상 속 시간은 \(\tau\)로 적는다.
상상된 궤적은 실제 경험에서 얻은 잠재 상태 \(s_t\)에서 출발하여 다음 세 식을 반복한다.
여기서 중요한 점은, 상상이 아무 데서나 시작되는 것이 아니라 실제 데이터에서 얻은 잠재 상태에서 시작한다는 점이다. 즉, Dreamer는 현실과 완전히 동떨어진 허공 상상을 하지 않는다.
5. 행동 모델(action model)과 가치 모델(value model)¶
Dreamer는 액터-크리틱(actor-critic) 구조를 잠재 공간에서 학습한다.
행동 모델은 “지금 이 잠재 상태라면 어떤 행동을 하는 것이 좋을까”를 출력한다. 가치 모델은 “지금 이 잠재 상태는 앞으로 얼마나 좋은 결과로 이어질까”를 출력한다.
행동 모델은 평균과 표준편차를 예측한 뒤, 이를 \(\tanh\)로 변환한 가우시안 분포(Gaussian distribution) 로 만든다.
이 식의 의미는 단순하다. 행동을 무작위로 하나 뽑되, 그 무작위성까지 포함해 신경망 출력으로부터 미분 가능한 형태로 만든다는 뜻이다. 이렇게 해야 가치가 높아지는 방향으로 정책을 학습할 수 있다.
flowchart LR
S[잠재 상태 s_tau] --> A[행동 모델 q_phi]
A --> ACT[행동 a_tau]
ACT --> T[전이 모델 q_theta]
T --> NS[다음 상태 s_tau+1]
NS --> R[보상 모델 q_theta]
NS --> V[가치 모델 v_psi]
V -. 기울기 역전파 .-> A6. 가치 추정(value estimation)¶
Dreamer의 중요한 아이디어는 상상 지평 \(H\)까지만 직접 상상하고, 그 이후는 가치 모델로 이어 붙인다는 점이다. 논문은 세 가지 가치 추정 방식을 설명한다.
(1) 단순 누적 보상 \(V_R\)¶
이 방식은 상상 지평 안의 보상만 단순히 더한다. 계산은 쉽지만, 지평 밖의 보상은 완전히 무시한다. 논문은 이 방식을 가치 모델이 없는 절제 실험(ablation) 으로 쓴다.
(2) \(k\)-단계 부트스트랩 값 \(V_N^k\)¶
이 방식은 \(k\)단계까지는 상상한 보상을 더하고, 그 이후는 가치 모델 \(v_\psi(s_h)\)로 대신한다. 강화학습에서 자주 쓰는 부트스트랩(bootstrap) 아이디어이다.
(3) Dreamer가 실제로 쓰는 \(V_\lambda\)¶
\(V_\lambda\)는 여러 \(k\)값의 추정을 지수 가중 평균한 것이다. 짧게 부트스트랩하면 편향(bias)이 커지고, 너무 길게 상상하면 분산(variance)과 모델 오차가 커진다. Dreamer는 이 둘의 균형을 위해 \(V_\lambda\)를 쓴다.
flowchart LR
S0["s_tau"] -->|"a_tau, r_tau"| S1["s_tau+1"]
S1 -->|"a_tau+1, r_tau+1"| S2["s_tau+2"]
S2 -->|"..."| SH["s_tau+H"]
SH --> Vh["가치 모델 v_psi(s_tau+H)"]이 그림이 의미하는 바는 간단하다. 앞부분은 직접 상상한 보상으로 계산하고, 끝부분은 가치 모델이 요약한다는 것이다.
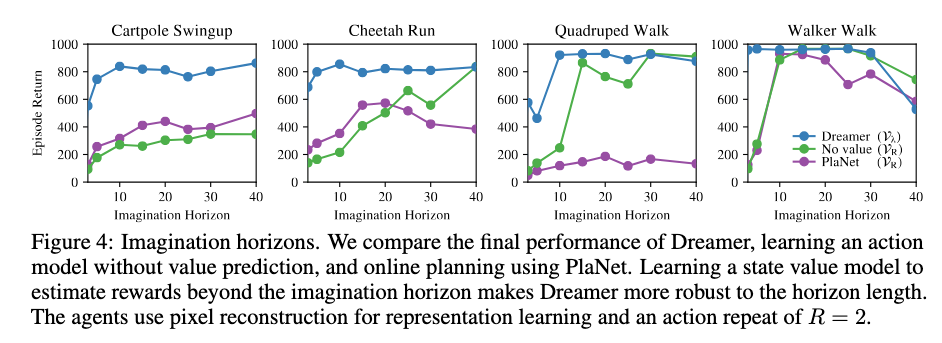
Figure 4는 바로 이 가치 모델이 얼마나 중요한지를 보여준다. 가치 모델이 있으면 상상 지평 길이에 덜 민감해지고, 장기 과제를 더 잘 푼다.
7. 학습 목표(objective)¶
Dreamer는 먼저 상상된 궤적의 모든 상태에 대해 \(V_\lambda(s_\tau)\)를 계산한 뒤, 행동 모델과 가치 모델을 각각 업데이트한다.
행동 모델 학습¶
행동 모델은 가치가 높은 상태들로 이어지는 행동을 출력하도록 학습한다. 핵심은 이 목표를 월드 모델을 통과하는 해석적 기울기로 최적화한다는 점이다.
가치 모델 학습¶
가치 모델은 \(V_\lambda\)를 맞히도록 회귀(regression)한다. 논문은 일반적인 강화학습처럼 목표값 \(V_\lambda\) 주변에서 기울기를 멈춘다(stop-gradient) 고 설명한다.
또한 조기 종료(early termination)가 있는 과제에서는, 월드 모델이 각 잠재 상태에서 할인율(discount factor) 도 예측한다. 그래서 상상된 미래가 중간에 끝날 가능성이 높을수록 뒤 시점의 항은 자동으로 약하게 반영된다.
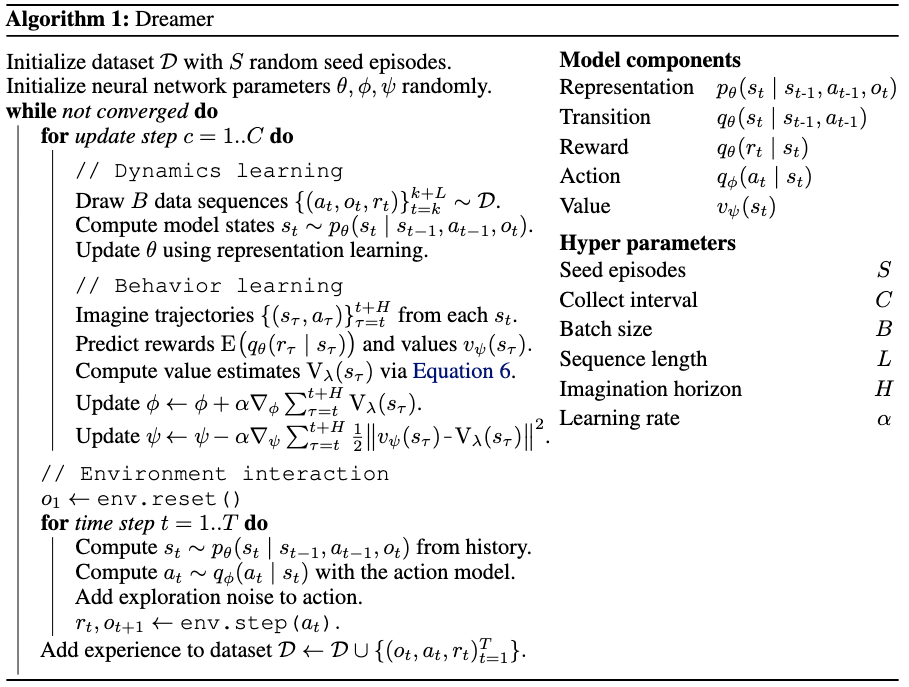
8. Dreamer의 알고리즘(Algorithm 1)¶
논문의 Algorithm 1을 쉬운 말로 다시 쓰면 다음과 같다.
1. 무작위 행동으로 초기 에피소드 S개를 모아 데이터셋 D를 만든다.
2. 파라미터 θ(월드 모델), φ(행동 모델), ψ(가치 모델)를 초기화한다.
3. 수렴할 때까지 반복한다.
3-1. 데이터셋에서 시퀀스 배치를 뽑아 월드 모델을 학습한다.
3-2. 그 시퀀스의 잠재 상태에서 미래 H단계를 상상한다.
3-3. 상상된 궤적으로부터 보상과 가치 예측을 계산한다.
3-4. V_lambda를 만들고, 이를 이용해 행동 모델과 가치 모델을 업데이트한다.
3-5. 현재 행동 모델을 실제 환경에서 실행해 새로운 데이터를 모은다.
3-6. 새 데이터를 다시 데이터셋 D에 추가한다.
핵심은 월드 모델 학습 → 상상 속 행동 학습 → 실제 데이터 추가가 계속 반복된다는 점이다.
9. 잠재 동역학 학습: 표현은 어떻게 배우는가¶
Dreamer의 행동 학습은 월드 모델이 좋아야 잘 된다. 논문은 세 가지 표현 학습 방식을 설명한다.
(1) 보상 예측(reward prediction)만으로 배우기¶
가장 단순한 방식은 미래 보상만 잘 맞히도록 잠재 상태를 배우는 것이다. 하지만 논문은 실제 실험에서 이 방식만으로는 충분하지 않았다고 보고한다.
(2) 픽셀 재구성(reconstruction)¶
PlaNet이 사용하던 방식이며, 실제 실험에서 가장 강했다.
월드 모델은 다음 네 가지 요소를 둔다.
그리고 목적식은 다음과 같다.
각 항의 의미는 다음과 같다.
- \(J_O^t\)는 잠재 상태가 현재 이미지를 잘 설명해야 함을 뜻한다.
- \(J_R^t\)는 잠재 상태가 보상도 잘 설명해야 함을 뜻한다.
- \(J_D^t\)는 현재 이미지를 너무 과하게 베끼지 말고, 전이 모델이 예측한 상태와 너무 멀어지지 말라는 규제항이다.
논문은 전이 모델을 RSSM으로, 이미지 인코더를 CNN으로, 이미지 복원기를 전치 CNN(transposed CNN)으로 구현한다.
(3) 대조 추정(contrastive estimation)¶
픽셀을 직접 맞히는 대신, “이 이미지가 이 잠재 상태를 잘 설명하는가”를 학습하는 방식이다. 이때 관측 모델 대신 상태 모델을 둔다.
대조 목적식은 다음과 같다.
쉽게 말하면, 현재 이미지가 현재 잠재 상태를 잘 가리키게 하되, 모든 이미지가 비슷한 잠재 상태로 무너져버리는 현상은 막는다는 뜻이다.
논문 실험에서는 이 방식이 절반 정도 과제에서는 통했지만, 전체적으로는 재구성 방식보다 약했다.
Results¶
1. 실험 설정¶
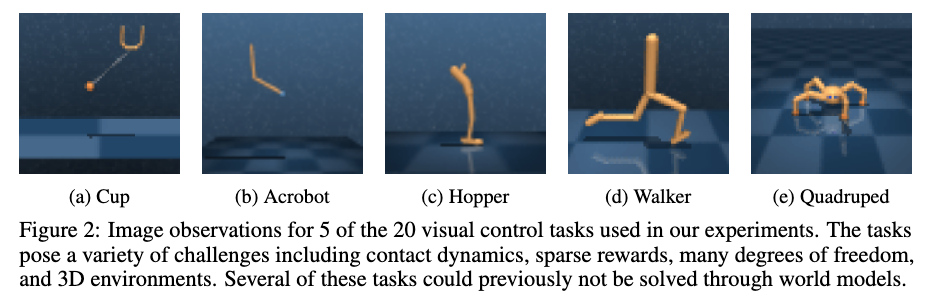
논문은 DeepMind Control Suite의 시각 제어 20개 과제를 사용한다. Figure 2는 Cup, Acrobot, Hopper, Walker, Quadruped의 예시 이미지를 보여준다. 이 과제들은 접촉 동역학(contact dynamics), 희소 보상(sparse rewards), 많은 자유도(degrees of freedom), 3차원 장면을 포함한다.
실험 설정의 핵심은 다음과 같다.
- 입력 이미지는 64 × 64 × 3이다.
- 행동 차원은 1에서 12 사이이다.
- 보상은 0에서 1 사이이다.
- 에피소드 길이는 1000스텝이다.
- 초기 상태는 무작위화된다.
- 모든 연속 제어 과제에서 같은 하이퍼파라미터를 쓴다.
- action repeat는 고정된 \(R = 2\)이다.
논문은 추가로, 이산 행동(discrete action)과 조기 종료(early termination)에 대해서도 Atari 일부 게임과 DeepMind Lab 일부 레벨에서 Dreamer를 실험한다.
3. 주요 정량 결과(Table G)¶
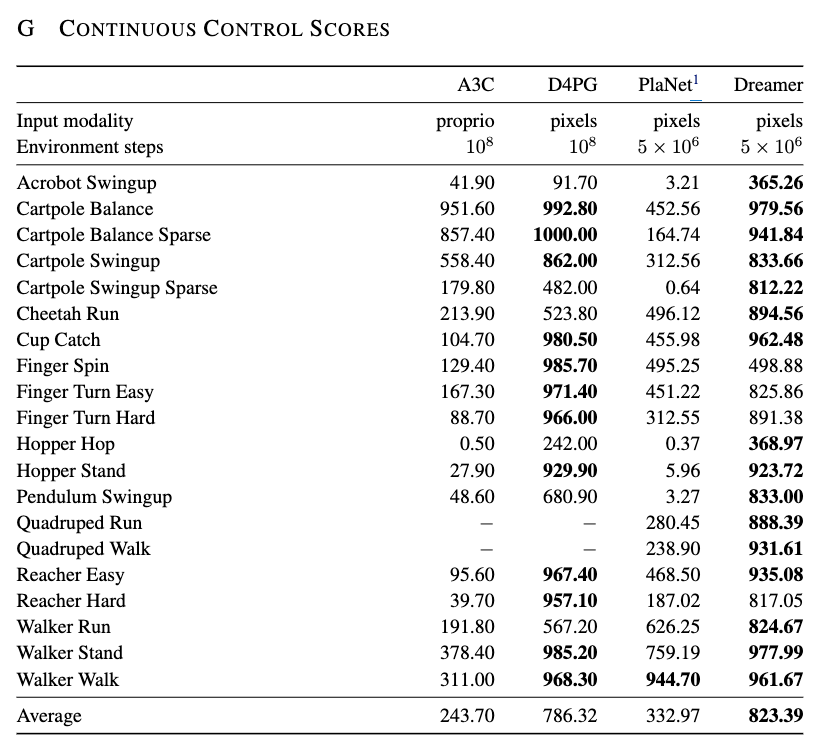
논문 부록 G의 연속 제어 최종 점수는 다음과 같다. A3C는 proprio 입력, D4PG와 PlaNet, Dreamer는 pixel 입력을 사용한다. 또한 PlaNet 점수는 action repeat를 \(R = 2\)로 고정하여 다시 실행한 값이다.
이 표는 두 가지를 동시에 보여준다.
첫째, Dreamer가 모든 과제에서 무조건 최고는 아니다. 예를 들어 Finger Spin, Hopper Stand, Walker Stand 같은 과제에서는 D4PG가 더 높다. 이 점은 논문을 읽을 때 꼭 기억해야 한다. Dreamer는 “전 과제를 압도적으로 다 이긴 방법”이라기보다, 평균적으로 매우 강하고 특히 장기 과제에서 두드러진 방법이다.
둘째, Dreamer의 진짜 장점은 샘플 효율성(sample efficiency) 이다. 논문 Figure 6의 핵심 문장은 다음과 같이 요약할 수 있다.
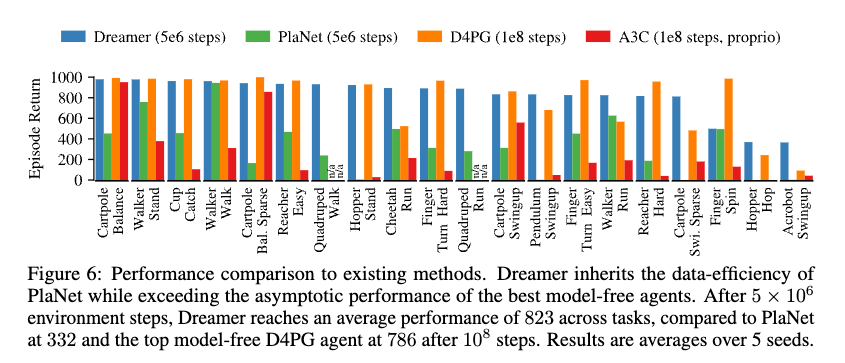
- Dreamer: 평균 823, 5 × 10^6 환경 스텝
- PlaNet: 평균 333, 5 × 10^6 환경 스텝
- D4PG: 평균 786, 10^8 환경 스텝
즉 Dreamer는 훨씬 적은 실제 환경 상호작용으로 강한 모델 프리 기준선을 앞선다.
4. Figure 4: 왜 가치 모델이 그렇게 중요한가¶
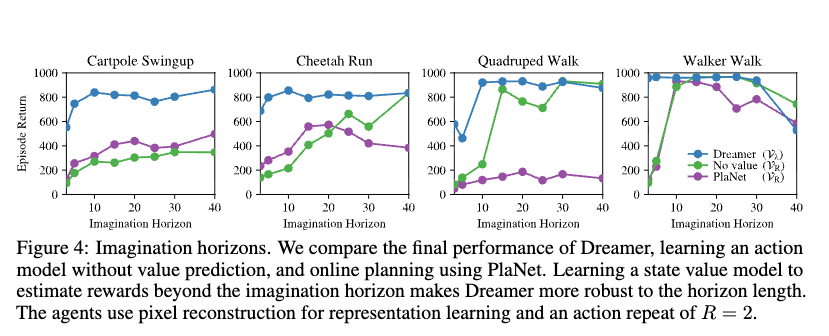
Figure 4는 Dreamer를 세 가지와 비교한다.
- Dreamer (\(V_\lambda\) 사용)
- No value (\(V_R\)만 사용)
- PlaNet (\(V_R\)를 쓰는 온라인 계획)
결과는 일관되다. 가치 모델이 없는 방법은 상상 지평에 크게 민감하다. 상상 길이가 짧으면 장기 보상을 놓치고, 길면 모델 오차가 쌓이기 쉽다. 반면 Dreamer는 가치 모델이 지평 너머를 요약하기 때문에, 상상 지평이 달라져도 성능이 상대적으로 안정적이다.
이 결과는 Dreamer의 핵심 주장이 단순한 아이디어가 아니라 실제 효과가 있음을 보여준다.
5. Figure 5: Dreamer의 월드 모델은 정말 미래를 예측하는가¶
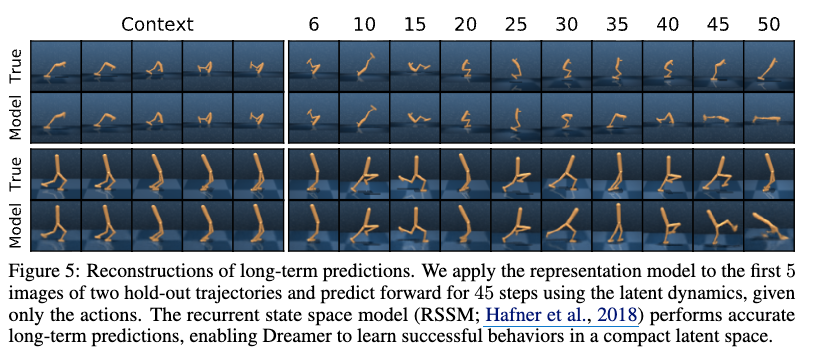
Figure 5는 두 개의 hold-out trajectory에 대해, 처음 5장의 실제 이미지만 보고 행동 정보만으로 45스텝 앞까지 재구성한 결과를 보여준다. 그림만 보면 완벽한 픽셀 수준 예언은 아니지만, 긴 시간 동안 물체의 위치와 움직임을 꽤 잘 따라간다.
이 그림의 메시지는 분명하다. Dreamer가 정책을 잠재 공간에서 배울 수 있는 이유는, 그 잠재 동역학이 장기 구조를 어느 정도 보존하는 상상 환경을 만들기 때문이다.
6. Figure 7과 Figure 10: 장기 과제에서 왜 Dreamer가 강한가¶
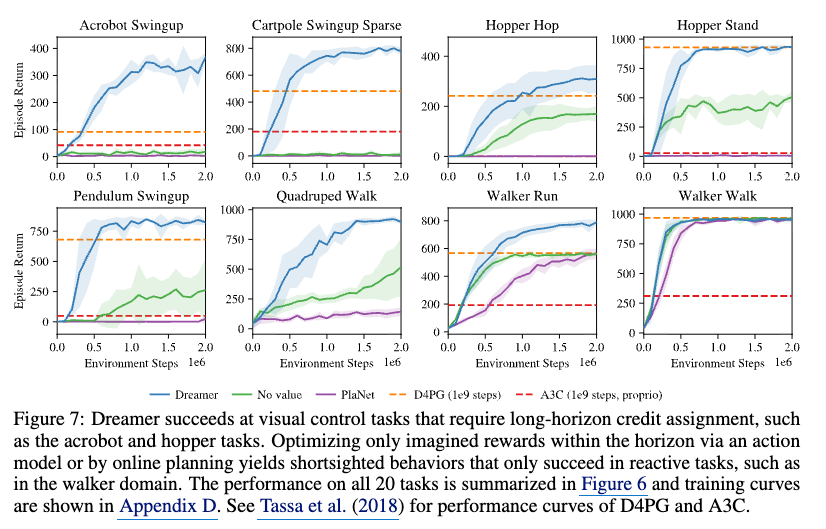
Figure 7은 Acrobot Swingup, Hopper Hop, Pendulum Swingup, Quadruped Walk 같은 장기 신용 할당(long-horizon credit assignment) 문제가 필요한 과제에서 Dreamer가 특히 강함을 보여준다. 논문은 장기 보상을 연결해야 하는 이런 과제에서는 상상 구간 안의 보상만 최적화하는 방법이 쉽게 실패한다고 해석한다.
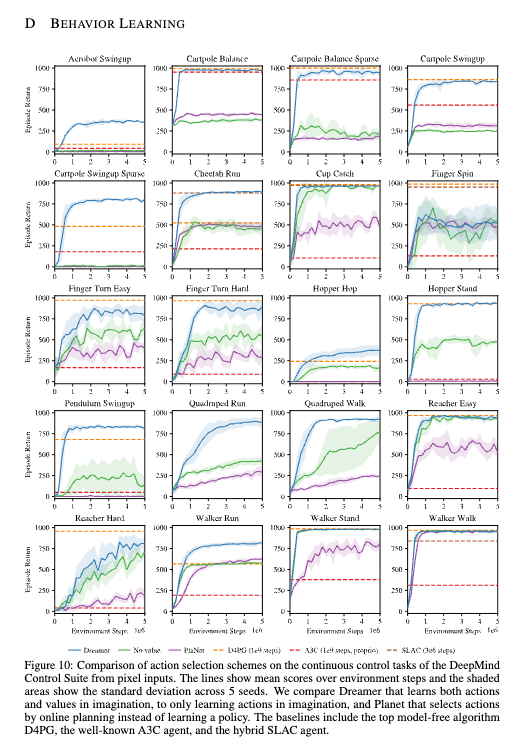
Figure 10의 전체 학습 곡선을 보면 Dreamer는 20개 중 대부분에서 No value와 PlaNet을 앞선다. 논문은 horizon 20 설정에서 Dreamer가 20개 중 16개 과제에서 우세하고, 4개는 비긴다고 서술한다.
7. Figure 8과 Figure 11: 표현 학습이 성능을 좌우한다¶
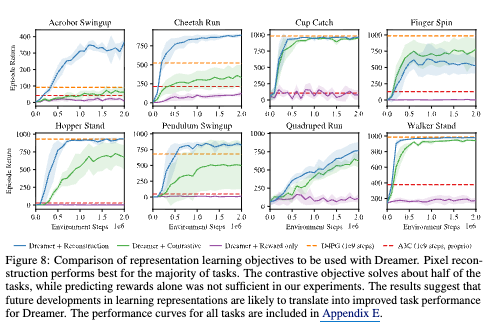
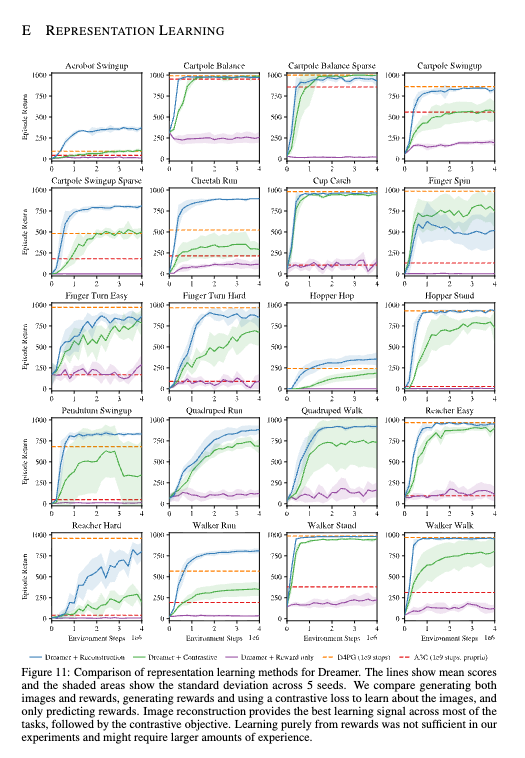
Dreamer는 표현 학습을 분리해서 볼 수 있는 구조를 가진다. Figure 8과 Figure 11은 다음 순서를 보여준다.
- 픽셀 재구성(reconstruction) 이 대체로 가장 좋다.
- 대조 추정(contrastive) 은 절반 정도 과제에서 경쟁력이 있다.
- 보상만 예측(reward only) 하는 방식은 전반적으로 부족하다.
이는 Dreamer가 “강력한 행동 학습 알고리즘”인 동시에, 좋은 월드 모델이 있어야 비로소 제힘을 낸다는 뜻이다. 논문 결론도 미래 연구 방향으로 표현 학습 발전을 강조한다.
Discussion¶
1. Dreamer의 강점¶
(1) 월드 모델을 ‘정책 학습’까지 밀어붙인다는 점이 강하다¶
기존 연구 중에는 월드 모델을 온라인 계획에만 쓰거나, 세계를 대충 예측만 하고 정책 학습은 따로 하는 경우가 많았다. Dreamer는 월드 모델 내부에서 직접 액터-크리틱 학습을 수행한다. 이것이 PlaNet과 가장 크게 갈리는 지점이다.
(2) 픽셀을 직접 상상하지 않고 잠재 상태를 상상한다¶
이는 계산량과 안정성 면에서 큰 장점이다. 픽셀 미래 예측은 무겁고 오차가 커지기 쉽다. Dreamer는 잠재 상태만 굴리기 때문에 수천 개의 상상 궤적을 빠르게 병렬 처리할 수 있다.
(3) 상상 지평의 짧음을 가치 모델로 보완한다¶
Dreamer의 가치 모델은 “지금 여기서 계속 잘하면 앞으로 얼마나 좋을까”를 요약하는 장치이다. 이 장치가 없으면 짧은 미래 안의 보상만 보게 되어 장기 과제에 약해진다. Figure 4와 Figure 7은 바로 이 부분을 실험적으로 뒷받침한다.
(4) 샘플 효율성과 계산 시간 모두 좋다¶
논문은 Dreamer가 PlaNet보다 평균 성능이 높고, D4PG보다 적은 환경 상호작용으로 더 높은 평균 점수를 냈다고 보고한다. 게다가 10^6 스텝당 약 3시간 학습으로 계산 시간 면에서도 유리하다고 설명한다.
2. Dreamer의 한계와 주의할 점¶
(1) 월드 모델이 틀리면 정책도 틀릴 수 있다¶
Dreamer는 모델 안에서 상상하며 학습하기 때문에, 월드 모델 오차(model error)가 누적되면 잘못된 행동을 배울 위험이 있다. 논문은 잠재 공간, 짧은 상상, 가치 부트스트랩으로 이를 완화하지만, 이 문제가 완전히 사라진 것은 아니다.
(2) 표현 학습 품질에 크게 의존한다¶
Figure 8과 Figure 11이 보여주듯, 어떤 표현 학습 목적식을 쓰느냐에 따라 결과 차이가 크다. 즉 Dreamer의 성능은 순수하게 행동 학습 알고리즘만의 힘이 아니라, 좋은 잠재 표현을 얼마나 잘 얻느냐에도 달려 있다.
(3) 모든 과제에서 절대 최강은 아니다¶
Table G를 보면 Dreamer가 평균은 최고지만, Finger Spin, Hopper Stand, Walker Stand 등 일부 과제에서는 D4PG가 더 높다. 따라서 Dreamer를 “항상 최고인 만능 방법”으로 이해하면 안 된다.
(4) 이산 제어에서는 아직 발전 여지가 크다¶
논문은 Atari와 DeepMind Lab 일부 과제에 대한 가능성을 보여주지만, 이 영역에서 당시 최고 수준의 성능을 전면적으로 주장하지는 않는다. 이는 Dreamer의 핵심 장점이 우선 연속 제어와 시각 기반 장기 과제에서 가장 분명하게 나타났다는 뜻이다.
3. World Models, PlaNet, Dreamer를 한 줄씩 비교하면¶
| 방법 | 월드 모델 사용 방식 | 행동 결정 방식 | Dreamer와의 차이 |
|---|---|---|---|
| World Models (2018) | 꿈속 환경을 만들고 컨트롤러를 학습한다 | 진화 전략(CMA-ES) | Dreamer는 가치 기울기를 이용해 정책을 직접 학습한다 |
| PlaNet (2018) | 잠재 동역학을 학습한다 | 매 시점 온라인 계획 | Dreamer는 계획을 매번 하지 않고 정책을 학습해 바로 실행한다 |
| Dreamer (2020) | 잠재 동역학 + 가치 모델 | 잠재 공간 액터-크리틱 | 장기 가치와 미분 가능한 상상을 함께 활용한다 |
이 표를 보면 Dreamer의 위치가 분명해진다. Dreamer는 월드 모델 기반 계획(planning)과 정책 학습(policy learning) 사이를 강하게 연결한 논문이다.
4. 이 논문이 왜 중요한가¶
Dreamer는 이후 DreamerV2, DreamerV3로 이어지는 계보의 시작점이다. 더 넓게 보면, 이 논문은 “월드 모델이 있으면 계획만 하는 것이 아니라, 정책 자체를 학습할 수도 있다”는 것을 설득력 있게 보여준 사례이다.
특히 이 논문의 메시지는 다음 한 문장으로 정리할 수 있다.
좋은 잠재 월드 모델이 있다면, 에이전트는 그 안에서 미래를 상상하고, 그 상상에서 바로 행동을 배울 수 있다.