Lecture 9. Reinforcemeht Learning : A Primer, Multi-Task, Goal-Conditioned#
Organization: 가짜연구소 (Pseudo Lab)
Editor: 백승언 (Seungeon Baek)
강의 자료: CS330 2020 Fall
강의 영상: Youtube
강의 보조 자료: HER
강의 보조 자료 리뷰: HER 리뷰
안녕하세요, Nota AI에서 강화학습 연구원으로 재직중인 백승언 입니다. 5기에 이어, 6기 아카데믹 러너에 참여하여, 열정 있는 분들과 CS330 스터디를 이어갈 수 있어 너무 감사한 것 같습니다.
두 번 연속 스터디를 주최하고 이끌어가 주시는 민예린님과, 한 명의 이탈자도 없이 같이 참여해주시는 스터디원 분들 모두, 이 자리를 빌어, 다시 한 번 감사드립니다.
사다리 타기에 져서, 스터디의 시작이자 CS330의 RL 파트의 시작을 맡게 되어 어느정도 부담도 되지만, 열심히 강의를 리뷰 해보도록 하겠습니다!
해당 강의의 RL 파트의 시작인 본 강의는 첼시 핀 교수 대신 카롤 교수가 강의를 이어가는 것 같습니다.
카롤 교수님께서 해당 강의는, 뒤이어 계속될 RL 강의의 Primer라고 얘기를 해주시고 계시며, 또한 Multi-Task RL, Goal-Conditioned RL에 대해서 다룬다고 합니다.
Karol Hausman 교수님은 폴란드 출신이라고 합니다. 고전적인 로보틱스를 공부한 배경을 가지고 계시며, 세르게이 레빈 교수님께 박사 학위를 받았다고 하네요 후후..
강의 기준으로, 2020년 에는 구글 브레인에서 로보틱스팀에서 Research Scientist포지션을 맡고 있다고 하시네요. (믿고 듣는 스탠포드 강의?)
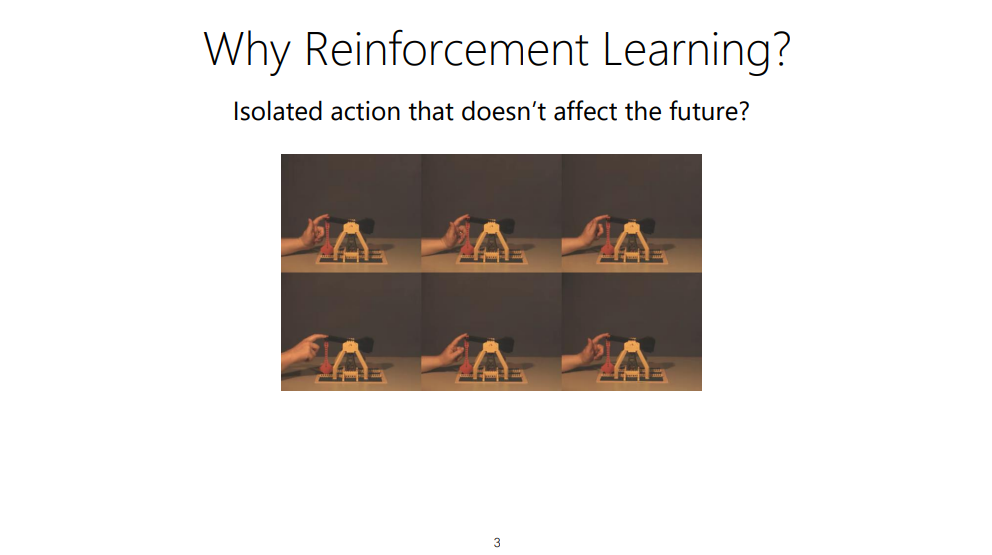
이 장에서는 왜 강화학습에 관심을 가져야 하는지에 대해서 얘기를 하는 것 같습니다.
먼저, 단일 행동이 미래에 영향을 끼칠까?에 대해서 얘기를 시작합니다.
카롤 교수는 그렇다고 합니다. 그러면서, 슬라이드에 표현된 더블 펜듈럼을 통해, 카오스 이론과 나비 효과에 대해서 설명을 해주고 있습니다.
강의에서는, 정말 작은 초기 값의 차이(손으로 미는 힘)에 따라서 궤적이 아예 달라진다고 하네요. (강의에서는 애니메이션입니다!)
강화학습은 이런 문제들을 해결하는 것을 노력한다고 합니다.
robotics: 연속적인 모터 제어
language & dialog: 연속적인 대화..ㅎ
autonomous driving: 연속적인 제어
business operaetion: 연속적인 의사결정…?
finance: 연속적인 구매/판매..?
그리고, 모든 행동들이 실제로 long term 결과를 가져온다고 생각하고, 모델링을 하려고 한다고 합니다.
그래서, 순차적 의사 결정 문제를 풀기에 좋은데, 어떤 행동이 미래에 어떻게 영향을 주는지, 미래 결정에 어떤 영향을 주는지 등등을 해결할 수 있다고 합니다.
해당 강의의 첫 번째 목적은, muilti-task RL과 친해지는 것이라고 합니다.
그 후, Policy gradient method와, multi-task RL 문제를 Policy gradient를 이용해서 해결하는 방법에 대해 다룬다고 합니다.
그 다음, Q learning과, multi-task RL 문제를 Q learning을 이용해서 해결하는 방법에 대해서 다룬다고 합니다.
그럼 먼저, multi-task RL에 대해서 다뤄 보겠습니다!
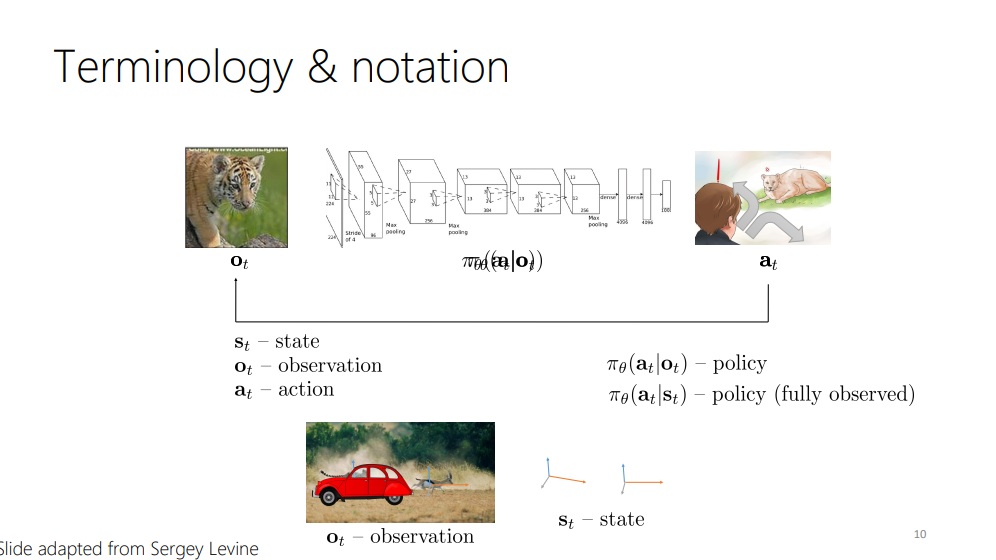
이 장에서는, 본격적인 강의 이전에, 해당 강의에서 사용할 용어들에 대해서 먼저 짚고 넘어가려고 하는 것 같습니다.
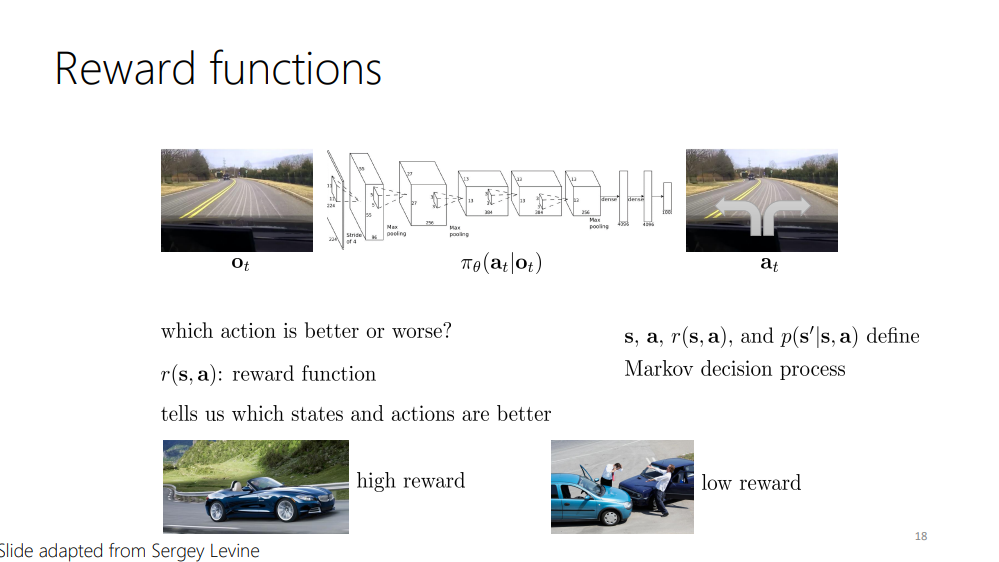
카롤 교수님은 용어를 설명하기 위한 예시로써, 지도학습 파이프라인 내에서, image에서의 객체 인식을 사용했습니다. (슬라이드엔 없고 상기 링크가 준비된 영상에서, 애니메이션 이전의 그림을 볼 수 있습니다.)
해당 지도학습 파이프라인 하에서, image가 입력되면, image가 신경망을 통과하고, 신경망은 image의 class를 출력합니다.
이를 강화학습으로 바꿔 보면… 일단, 모든 입력과 출력에 time step t가 sub index로 붙는다고 합니다.
입력의 경우, 특정 time step t에 입력받은 image (o_t)가 되며, 신경망은 해당 time step에 대해서 action(a_t)을 출력 한다고 합니다.
또한, action은 다음 observation (o_(t+1))에 영향을 줄 것이라고 합니다. 그러면 다음 스텝의 액션(a_(t+1))이 출력 되고.. 샬라 샬라
그림에서는 유쾌하게도, 도망갈 방향을 선택하는 것을 action으로 사용한 것 같습니다.
위의 과정을 간단히 표기하기 위해, 다음과 같은 표기법(notation)을 사용한다고 합니다.
o_t - observation at time step t
a_t - action at the time step t
\pi_\theta(a_t|o_t) - probability of action a_t given o_t
\pi_\theta(a_t|s_t) - probability of action a_t given s_t
이때, s_t에 대한 정책은, fully observable한 상황에서만 얻을 수 있다는 언급을 하고, 다음 장에서 이를 설명하고자 하였습니다.
위에서 state와 observation의 차이를 설명하기 위해, 철학에서 다음과 같은 예시를 빌려왔다고 합니다. 똑똑하신 분.. 이는 플라토의 동굴이라고 하네요.
state는 어떻게 행동해야 할 지를 알기 위해 필요한 정보이며, observation은 right decision을 내리기에는 불완전한 정보라고 합니다.
이전의 호랑이 그림에서, 정확한 액션을 하기 위해서는, image안에 무엇이 있는지를 먼저 알아야 한다고 합니다. 물체의 위치, 속도 등 state들은 이를 모두 포함한 것이며, observation은 occlusion을 포함할 수 있다고 합니다.
그러면, 모든 것을 observe하지 못 할때 어떻게 해야 할까?는 나중에 다룬다고 하네요! (애니메이션에서 생략된 page)
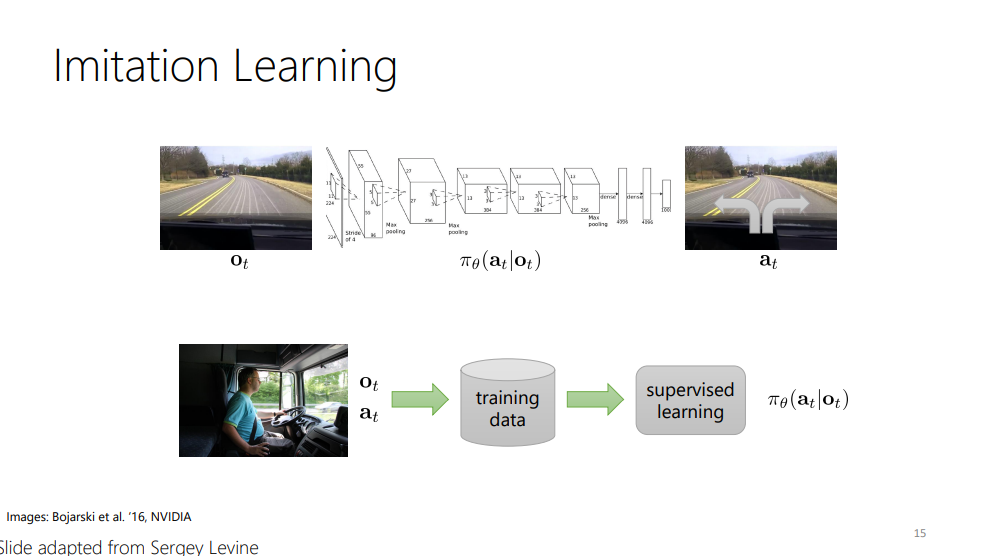
또한, 어떻게 정책을 찾는 지에 대해서 설명을 해 주고 있는데, 지도학습을 통해, 지식을 획득하여 정책을 얻는 방법이 있다고 합니다. 이를 이미테이션 러닝이라고 한다고 합니다.
카롤 교수님은, 운전을 예시로, 운전 data set을 마구 모아 training data set을 구축하고, 이를 통해 image에 따른 action을 하는 것을 얘기해 주었습니다.
이런 Imitation learning에서의 문제는 compounding error라고 하는, error가 점진적으로 accumulate되어 결국에 본 적 없던 state를 만나 잘못된 액션을 취하는 문제를 야기한다고 합니다.
강화학습은, 이러한 정책을 찾는 과정을 조금 더 전반적인 과정을 통해서 모델링 한다고 합니다.
강화학습에서는 optimize해야 할 utility가 있어야 한다고 합니다.
정책을 앞서 언급한 것 처럼 모방학습 처럼 인간 처럼 행동할수록 최적화 할 수도 있지만, 강화학습에서는 리워드를 최적화 한다고 합니다.
리워드는 어떤 액션이 좋은지 혹은 나쁜지에 대한 것을 알려줄 수 있는 함수라고 합니다.
이 함수는 state와 action에 의존 적이라고 하며, scalar value를 가지고 있다고 합니다.
운전을 예로 들면, high reward는 안전한 운전을 하였을 때 피드백 받을 수 있는 값이며, low reward는 사고 등 안좋은 운전을 하였을 때 피드백 받는 값이이라고, 예시로 들어 설명하고 있습니다.
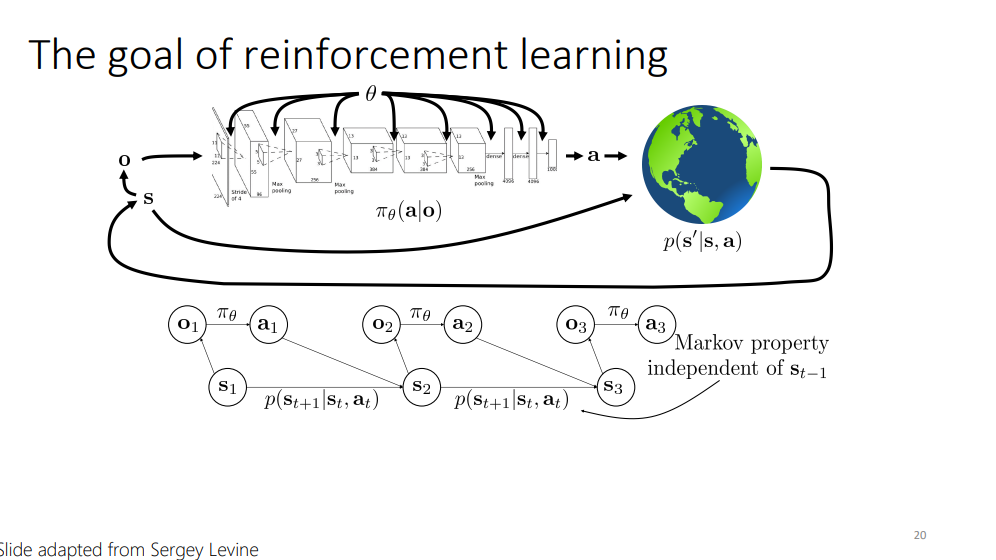
이 장 부터는 RL의 goal과 framework에 대해서 다룬다고 합니다.
목표는 policy의 parameter theta를 찾는 것이라고 합니다.
policy는 observation를 입력 받고, action을 출력하는 것이라고 합니다. 또한, world는 state와 action을 입력 받아 next state를 생산한다고 합니다.
또한, 이 장에서 강화학습에서 다루는 state는 이전의 state에만 관계가 있다고 하는, Markov property에 대해서도 설명을 합니다.
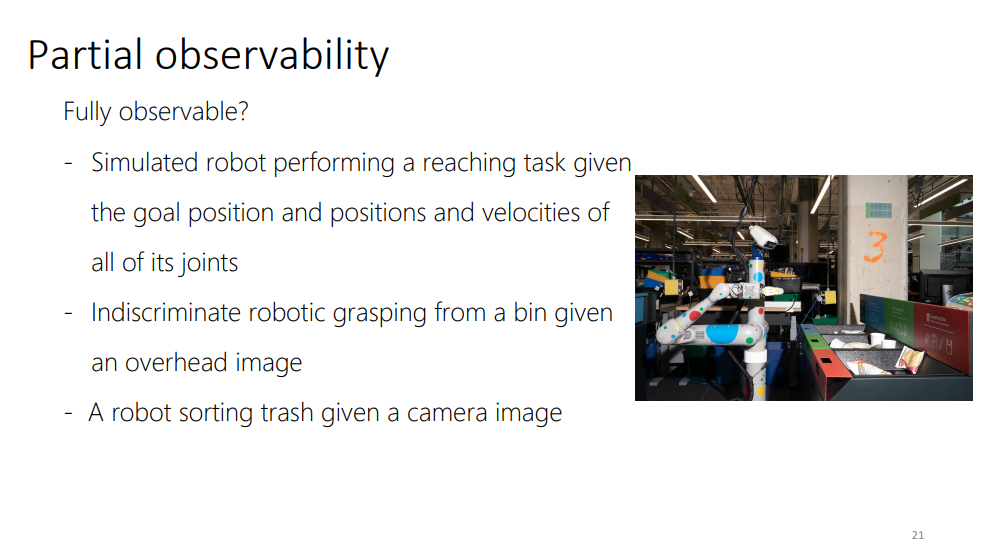
이 장에서는, 부분적으로 관측 가능한 시스템과 전체적으로 관측 가능한 시스템을 설명합니다. 슬라이드에는 안 나오지만, 여러 환경들이 fully observable한지, partial observable한지 학생들에게 질의 응답을 하며 인사이트를 나눠주었습니다.
ex) 카메라를 사용해서 image를 보고 물건을 잡는 task는 partial observable
왜냐하면, 물체의 무게도 모르고, z축 길이도 모를거고 등등…
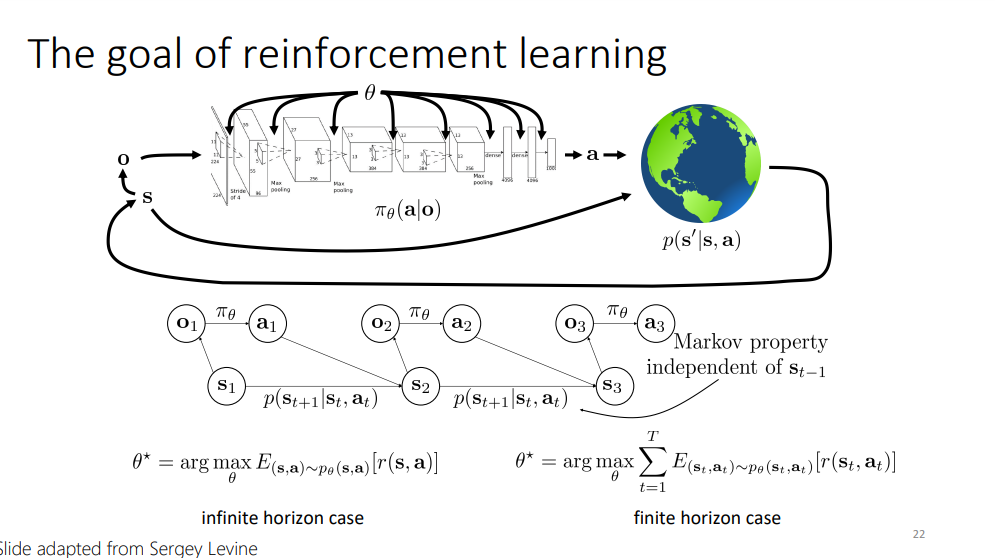
다시 한 번 강화학습의 목표 slide로 돌아와서, RL의 목표는 stationary한 환경에서(특정 state에서 action을 주면 무조건 특정 state’으로 변화), infinite horizon case(인생과 같이 끝나지 않는 의사 결정..)에서 reward의 기댓값을 최대로 하는 policy의 parameter들을 찾는것이라고 합니다.
finite horizon case(time 1~T)에서는 reward들을 1부터 T까지 sum up하는 기댓값을 최대로 하는 policy의 parameter들을 찾는 것이 목표라고 합니다.
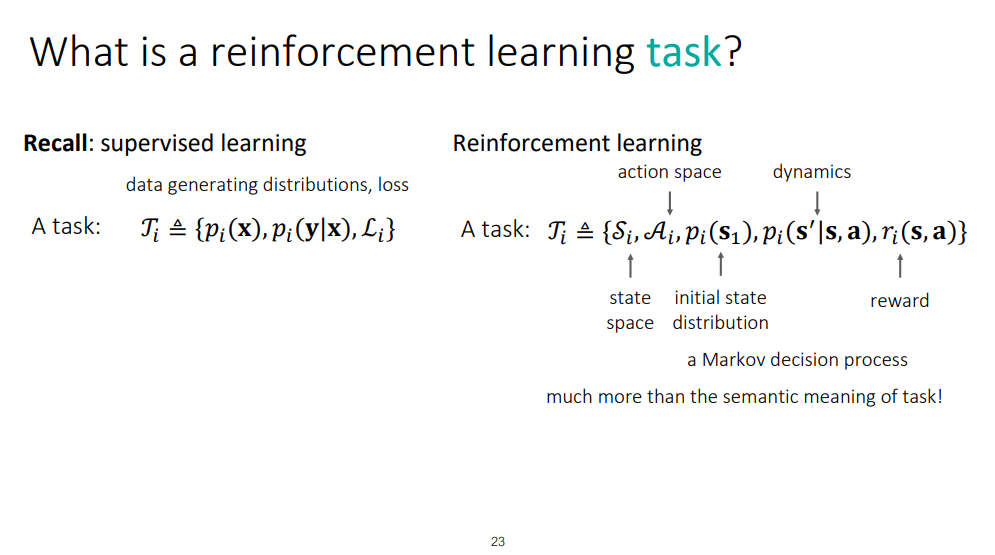
이 장에서는, 강화학습에서, task가 무엇인지에 대해서 이 장에서부터 언급이 되려고 하는 것 같습니다.
카롤 교수는 지도학습에서의 task는 x와 y의 data 분포, loss들을 묶어 task라고 했던 것을 다시 한 번 상기 시켜 줍니다.
이때, 강화학습에서의 task는 조금의 항들이 더욱 붙는다고 합니다. state space S, action space A, initial state distribution p(s_1), transition function p(s’|s,a), reward function r(s,a).
이는 사실 MDP이며, task의 의미론적 의미? 보다 많은 것을 담고 있다고 합니다. 이 말은 => 같은 task처럼 보여도, 강화학습 안에서는, 다른 MDP를 가지고 있다면 다른 task라고 하네요 오….
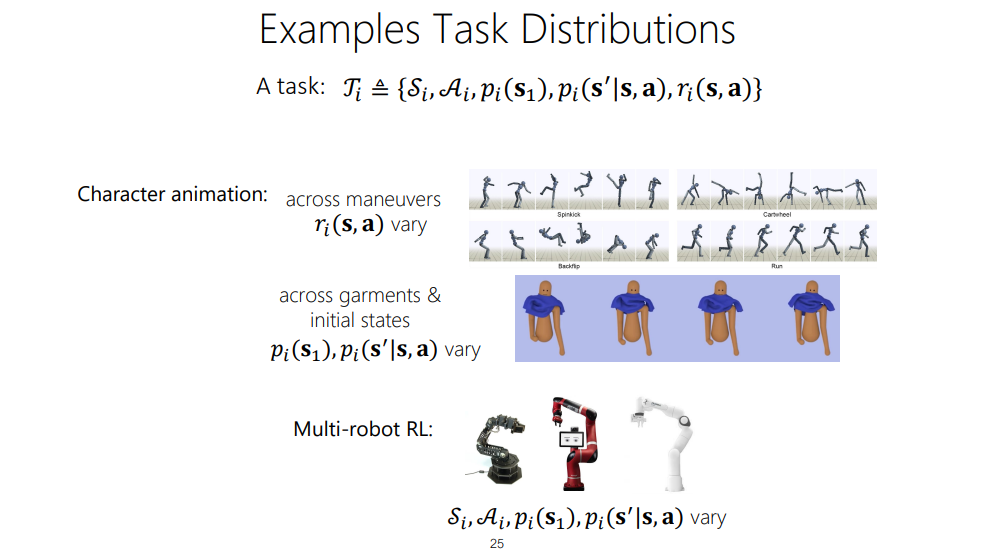
이 장에서는, task distribution들의 예시에 대해서 설명을 하고 있습니다.
예를 들어, 첫 번째 사진 속 캐릭터 애니메이션에서는, 다른 동작들을 학습하기 위한 다른 태스크들을 얘기할 수 있다고 합니다. 이 경우에는, task들 끼리 reward function이 다르다고 합니다.
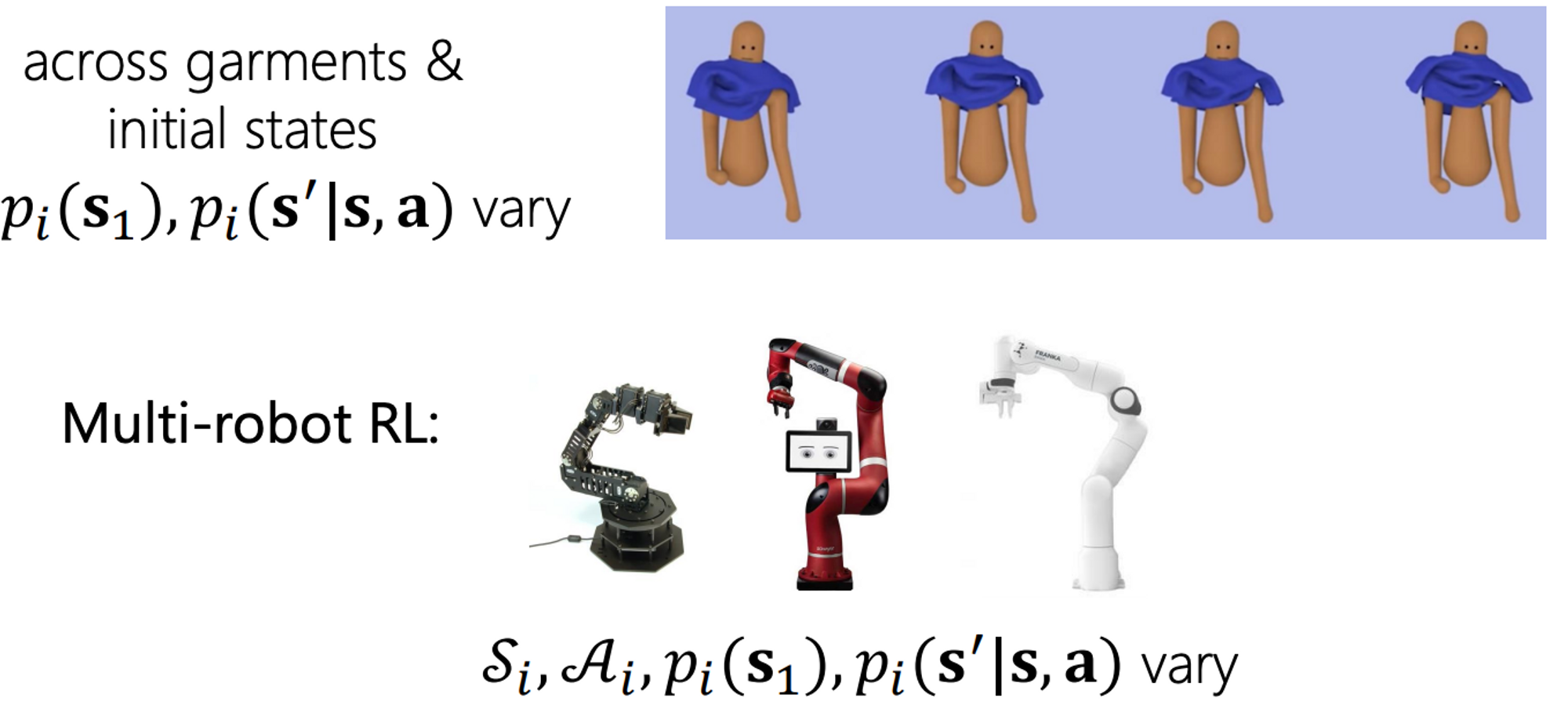
두 번째 사진 속 캐릭터 에니메이션에서는, 옷들이 다르고, 옷들이 입혀져 있는 상태가 다르므로, initial state distribution p(s_1)과 p(s’|,s,a)가 다르다고 합니다.
세 번째로는, 3개의 다른 로봇들에서의 강화학습을 예로 들고 있습니다. 해당 예제에서는 동일한 reward 즉, 물체를 잡았을때 발생하는 reward만 동일한 채, 나머지 MDP의 모든 요소가 다른 task라고 하는 것 같습니다.
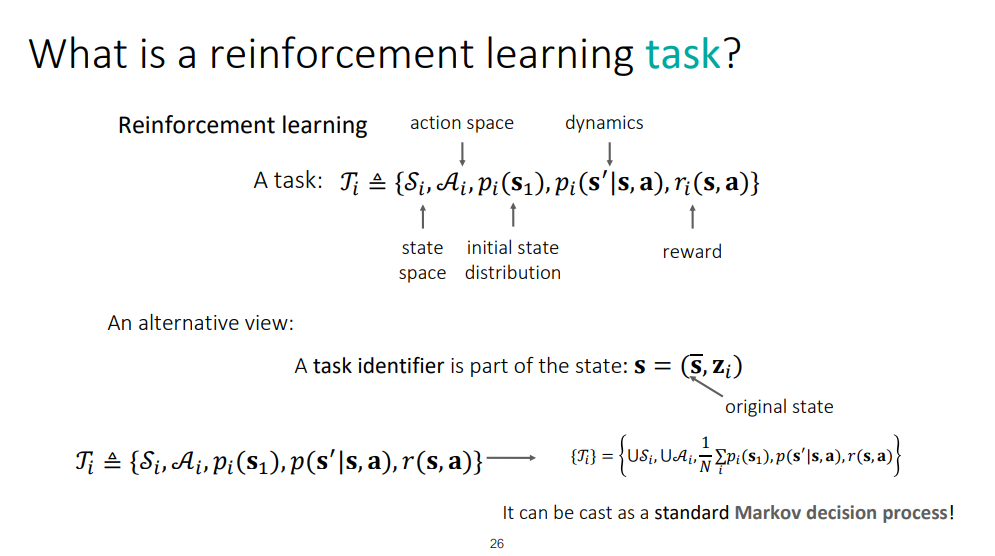
이 장에서는, 다른 관점에서 RL에서의 task를 설명하고자 하는 것 같습니다.
만약 state를 s=(\bar s, z_i)로 확장하고, task identifier z_i를 state에 붙인다면, multi-task setup을 single task와 같이 할 수 있다고 합니다! (맨 마지막 식)
이렇게 하면, multi-task RL problem을 one Markov Decision Process로 표현 할 수 있다고 합니다.
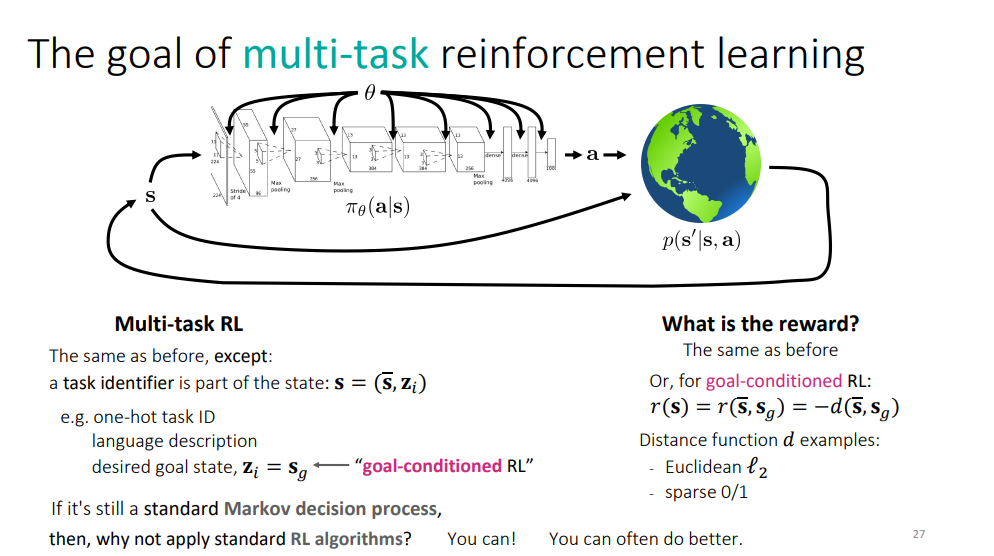
Multi-task RL에서의 목표는 이전에 본 것과 동일하다고 합니다. task identifier를 제외하고!
이러한 task identifier는 여러 종류가 될 수 있다고 합니다.
one-hot task ID
language description
desired goal state
또한, desired goal state z_i=s_g는 goal-conditioned RL에서 다룰 예정이라고 합니다.
goal-conditioned RL에서, reward는 보통 state와 goal state사이의 거리의 음수 값으로 정의 되며, 거리 함수는 여러 형태가 될 수 있다고 합니다.
유클리드 거리
sparse 0/1
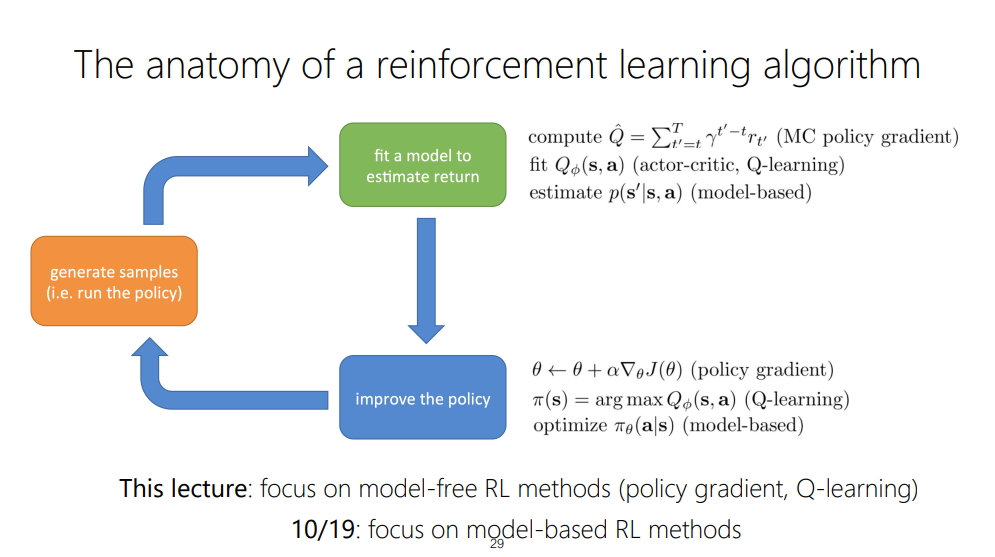
이 장 부터는 여러 RL algorithm을 해부하는 시간을 가지겠다고 합니다 꿀꺽..
강화학습 알고리즘은 일반적으로
sample을 생성하는 단계,
model이 return을 fit하는 단계,
policy를 improve하는 단계로 나뉜다고 합니다.
2에서, 모델이 return을 fit하는 단계에서, 현재 rollout의 모든 reward를 합치고, 이를 이용해 policy gradient를 수행하는 알고리즘이 MC policy gradient라고 합니다.
Actor-critic, Q-learning method들은 Q-funcdtion을 통해 return을 fit하고자 한다고 합니다.
model-based methods들은 transition function을 fit해서 return을 계산하는 방식을 이용한다고 하는 것 같습니다.
3에서, policy gradient method는 policy의 gradient를 직접적으로 구해서, 모델의 parameter에 적용하는 방식을 사용한다고 하는 것 같습니다.
Q-learning method는 Q-function들을 최대화 하는 방향으로 학습이 진행되며, 이를 통해 정책을 선택한다고 합니다. argmaxQ(s,a)!
model based methods에서는 model(p)을 학습하고, 이를 이용해서 policy를 직접적으로 최적화 한다고 합니다.
이 강의 내에서는 PG methods와 Q learning methods를 다룬다고 합니다! model-based는 다른 강의에서 다룬다고 하네요!
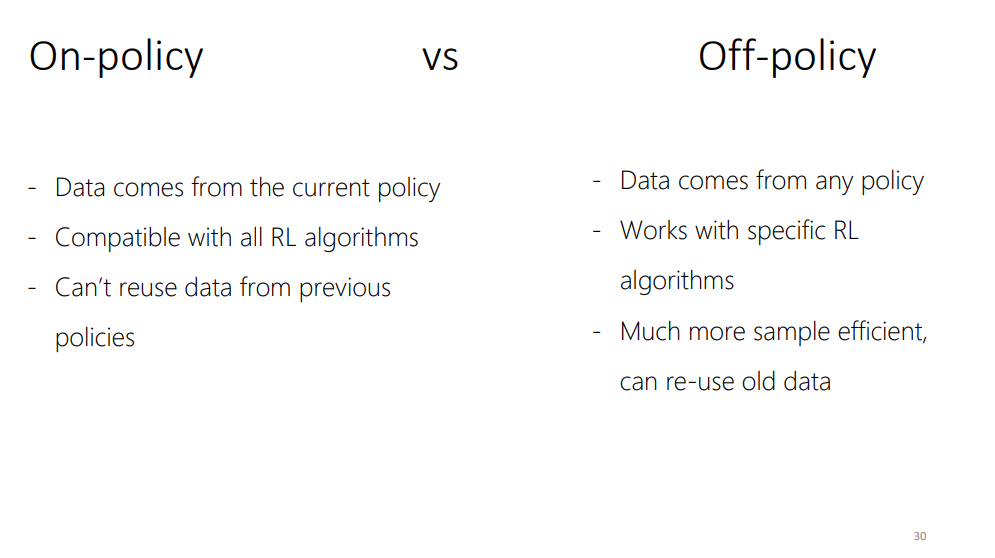
이 장에서는 On-policy RL, Off-policy RL에 대해 다룬다고 합니다.
on-policy RL에서는, 현재 policy로부터 얻어진 data distribution을 이용해서 정책을 학습시키는 알고리즘을 말하며, off-policy는 다른 policy로부터 얻어진 data distribution을 이용해서도 정책을 학습 시킬 수 있는 알고리즘을 말하는 것 같습니다.
장점과 단점은 슬라이드에 잘 나와 있으며, 그 자체의 특성으로 부터 기인한 것이 많은 것 같습니다.
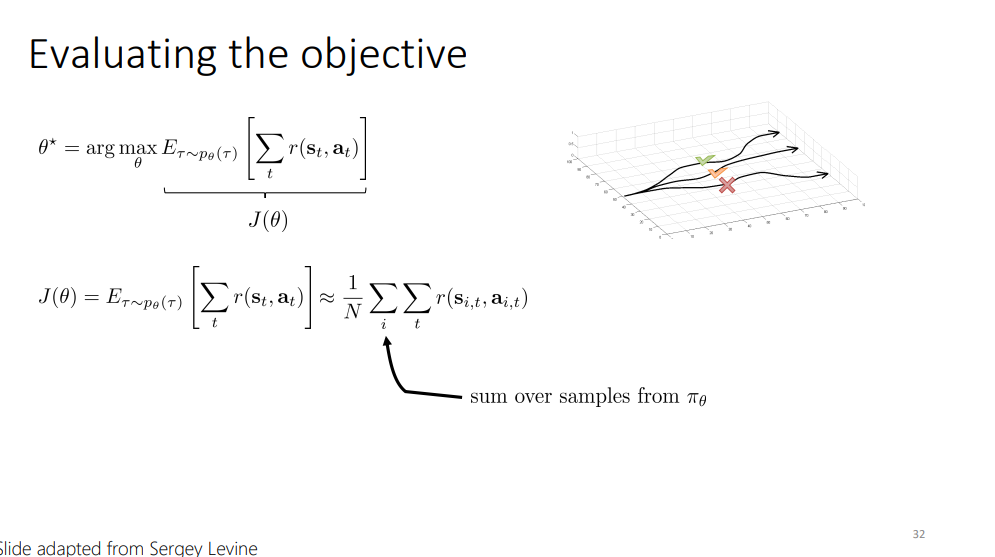
이 장 부터는 policy gradient에 대해서 다룬다고 합니다. 또한 PG를 설명할 때는 on-policy 기조를 유지한다고 합니다.
이 장에서 익숙하지 않은 term인 \tau는 state와 action의 joint probability로부터 나온 궤적이며, 오른쪽 그림의 initial state로부터 쫙 뻗어나가는 궤적을 생각해 주시면 될 것 같습니다.
그래서, 해당 parameter theta하에서의 얻어진 trajectory들 이내의 sum of rewards들의 기댓값을 최대로 하는 것이 목적 함수이며, 이를 만족하는 theta*를 찾는 것이 목표라고 합니다.
argmax 안쪽 term을 J(theta)로 표현하게 되면, 해당 J(theta)는 sampling을 통해 얻을 수 있다는 얘기를 카롤 교수는 전달합니다. 오른쪽 위 그림의 궤적 3개의 샘플!
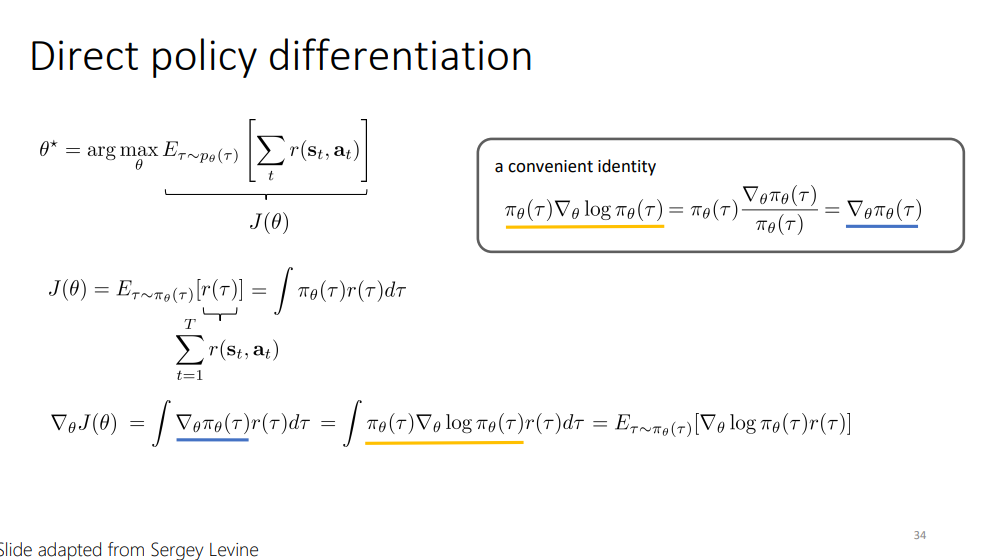
그러면, 카롤 교수는 어떻게 정책을 평가하는지는 보았으니, 이를 어떻게 개선 시킬 수 있을 지에 대해서 이 장에서 설명한다고 합니다. 어떻게 직접적으로 이를 미분할 지..!
그 방법을 위한 첫 번째 단계는, J(theta)를 바로 theta에 대해 미분하는 것입니다.
또한, log의 성질인 곱 => 합을 이용하기 위해, 이 단계에서는 3번 째 수식의 nabla_theta(pi_theta(tau))의 양변에 pi_theta(tau)/pi_theta(tau)를 곱해서, pi_theta(tau) * nabla_theta(*log(pi_theta(tau)))를 만들어 냅니다.
그 이유는 다음 장에..!
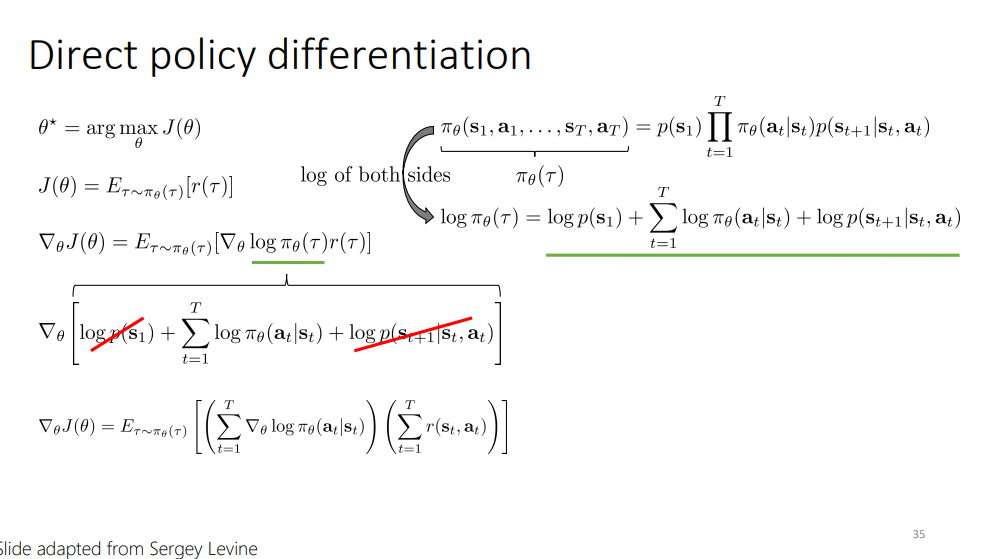
이렇게 nabla_theta(log(pi_theta(tau)))를 얻은 이후, pi_theta(tau)를 위 오른쪽 첫 번째 식처럼 분해를 하게 되면, 오른쪽 두 번째 식을 얻어낼 수 있습니다.
이때, theta에 대한 gradient는 두 번째 term만이 존재하기 때문에, 본 식은 왼쪽 맨 마지막 식만 남게 됩니다. 해당 gradient가 바로, policy를 개선할 수 있는 gradient인 것이라고 합니다.
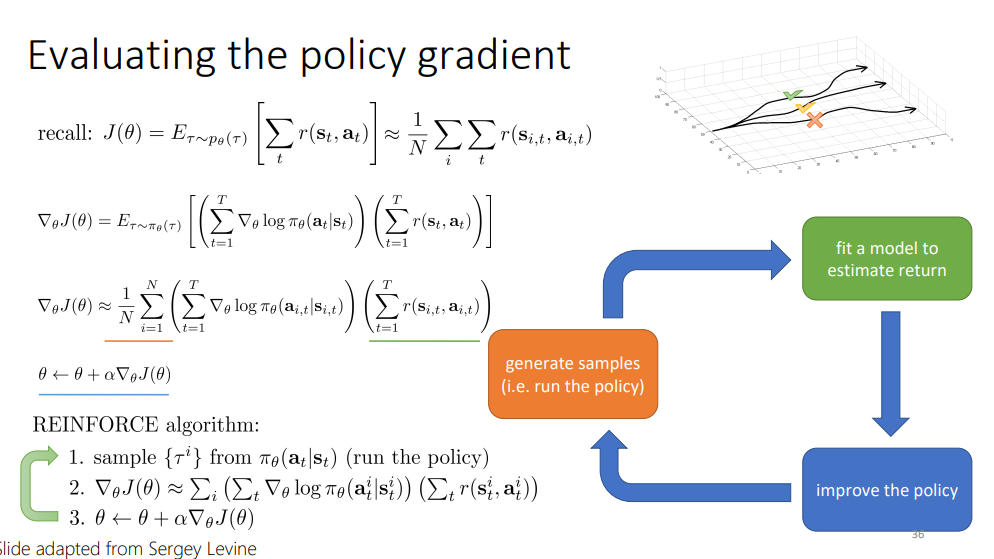
카롤 교수는 이때 질문을 합니다. 그러면, 이 문제를 어떻게 풀 수 있게끔 만들까? 이는 어떻게 policy evaluation => gradient를 쉽게 계산할 수 있을까로 이어진다고 합니다.
이는 전전전장에서 설명한 것 처럼, trajectory들을 sampling해서 수행할 수 있다고 합니다. 또한, N개의 표본에 대해 기댓값을 직접 계산해서 어느정도 근사 기울기 값을 구하는 방식으로 실제 학습을 수행할 수 있다고 합니다.
이렇게 얻은 gradient를 ascent하는 방향으로 theta를 업데이트 하기만 하면 끝!
다시 한 번, 3단계의 diagram을 가져와서, 해당 policy gradient를 이용해 theta를 업데이트 시키는 REINFORCE algorithm을 설명합니다.
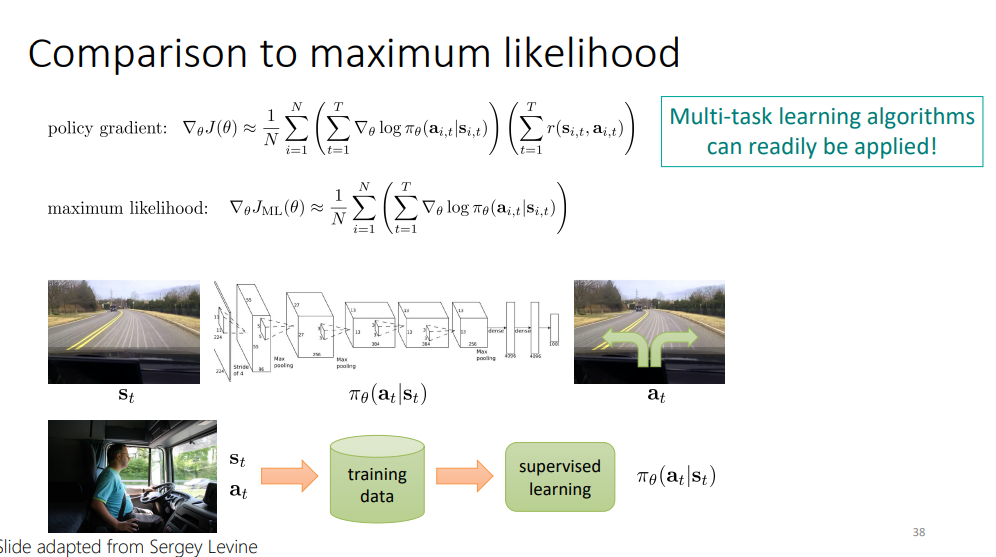
이 장에서는 재미있는 사실에 대해서 카롤 교수님이 공유를 하고 싶었던 것 같습니다.
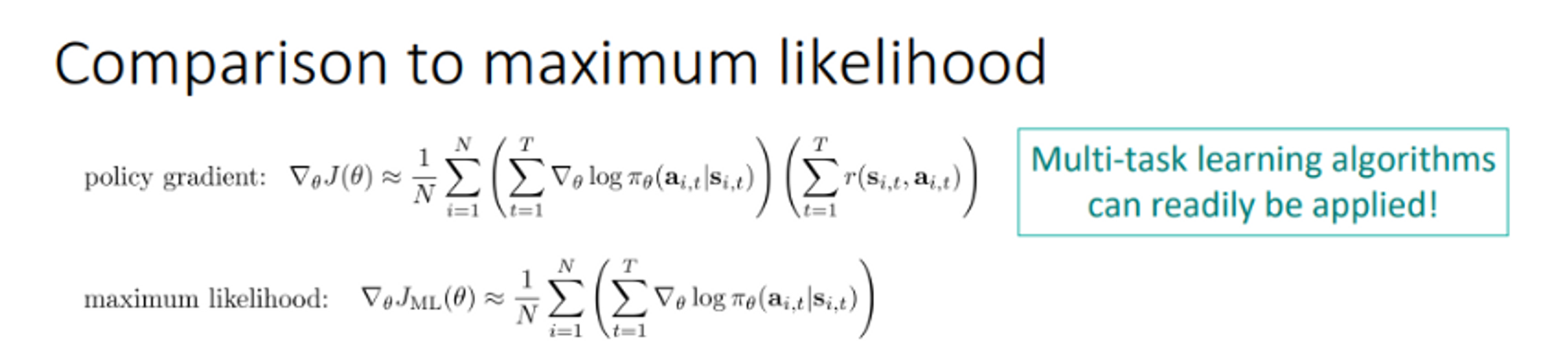
이는 policy gradient의 식이 imitation learning에서 사용할 maximum likelihood와 유사하다는 것입니다.
실제로 식을 보게 되면, t=1~T까지의 reward의 총합 즉 return term의 유무만이 차이임을 알 수 있습니다.
그리하여, reward의 sum이 1이 되는 셋팅일 경우, imitation learning과 objective function이 정확히 같다는 것을 언급합니다.
그러면서, 이에 대한 물리적 의미? 를 current rollout에서 current policy가 항상 positive한 업데이트만 된다! 라는 얘기를 해 주었는데, 살짝 모호한 감이 있는 것 같습니다.
또한, policy gradient에서 사용하는 objective function이 supervised learning에서 사용하는 그것과 비슷하다는 점은, 지도학습에서의 multi-task learning을 위한 개념들의 이식이 어렵지 않다는 뉘앙스의 이야기를 해 주셨습니다.
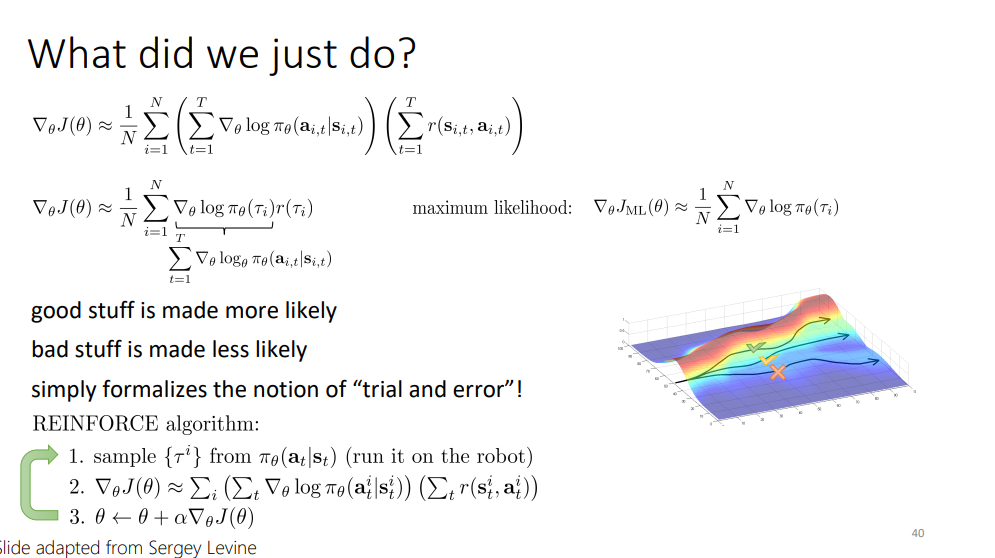
이 장에서 카롤 교수님은 짧게나마 각 과정에 대해 복습을 하는 시간을 가졌으며, maximum likelihood와 policy gradient의 objective function의 형태가 비슷하기에, reward의 총 합이 높을 경우, 해당 action | state의 likelihood 값이 높아지도록 학습이 잘 되며, 총 합이 낮거나 0일 경우, 해당 action | state의 likelihood 값이 낮아지도록 학습 되는 것이라는 인사이트를 전달해 주셨습니다.
좋은 것은 더 좋게! 나쁜 것은 더 나쁘게!
trial - and - error를 통해 알아내자!
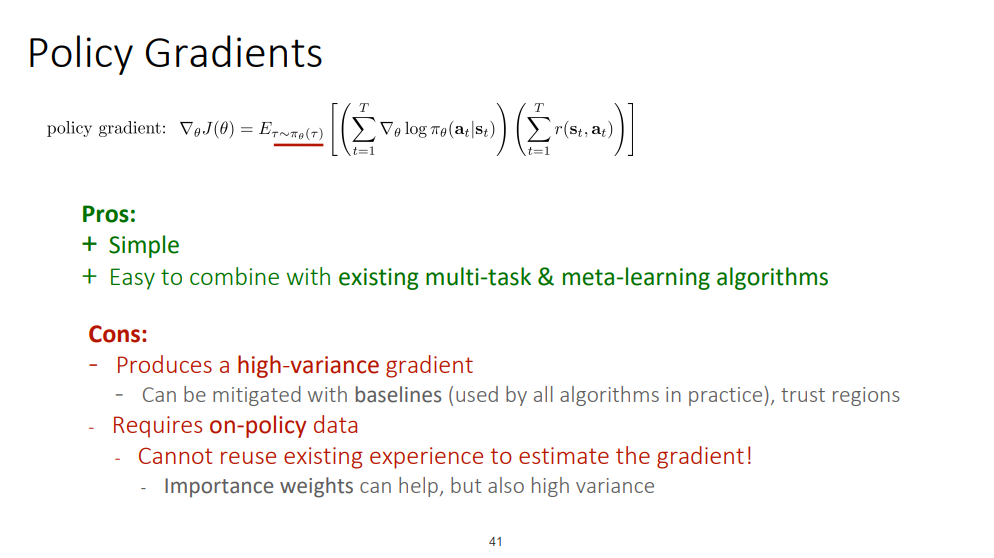
해당 장에서는 policy gradient에 대해서 요약해준다고 합니다.
장점
단순하다
기존에 존재하는 muiti-task & meta-learning algorithm들과 결합이 쉽다
단점
high-variance gradient를 산출한다.
reward의 총 합이 sample to sample이 아닌 trajectory to trajectory로 차이가 나기 때문으로 설명하는 것 같습니다.
이를 해결하기 위해, return에서 baseline을 빼는 일반적인 방법과, reward의 크기를 작게 만드는 방법 등이 있을것 같다고 얘기합니다. 언급하지는 않으셨지만, TRPO, PPO등 trust region내에서 업데이트를 하거나, 이전 정책과의 차이를 통해 penalty를 주는 알고리즘들도 슬라이드엔 표기가 되어 있는 것 같습니다.
on-policy dasta를 요구한다
이는 gradient를 추정하기 위해, 기존의 experience를 재 사용하지 못 하는 것을 의미한다고 합니다.
Important sampling이 이를 일부 해결해 줄 수는 있지만, 이 역시 high variance가 발생할 수 있다고 합니다.
이 장 부터 카롤 교수님께서는 Value-based RL에 대해서 다루려는 것 같습니다.
Q-learning은 off-policy algorithm이라고 하며, 그렇기에, data를 많은 다른 정책들로부터 얻어낼 수 있다고 합니다.
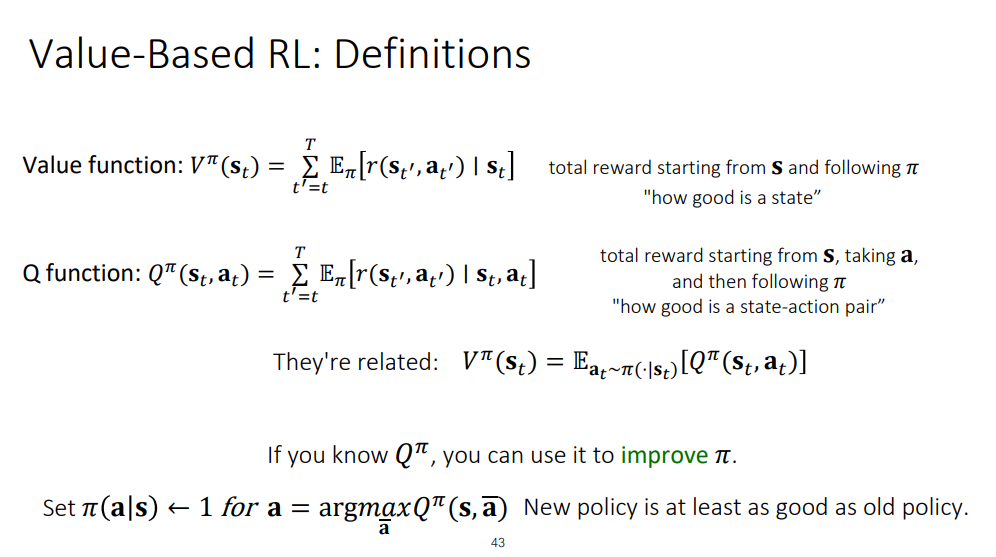
본격적인 설명 이전에, 카롤 교수님은 몇몇 용어들에 대한 정의로 시작을 하시는 것 같습니다.
Value function V^\pi(s_t)는 정책 pi 하에서, 현재 state로부터 시작해서 얻은 reward들의 총합을 표현하는 함수라고 합니다.
이는 현재 policy 하에서 특정 state의 가치를 표현한다고 합니다.
Q function Q^\pi(s_t, a_t)는 정책 pi 하에서, 현재 state에서 action으로 행동을 했을때 부터 얻은 reward들의 총합을 표현하는 함수라고 합니다.
이는 현재 policy 하에서, 특정 state에서 특정 action을 선택하는 것의 가치를 표현한다고 합니다.
또한, 그 둘은 3번째 식의 형태로 관계가 있다고 합니다. 즉 특정 상태 s_t에서 모든 행동에 대한 Q function의 기댓 값이 Value function이라는 것 같습니다.
Q 값을 이용하는 policy의 경우, Q를 가장 크게하는 action을 고를 확률이 1이 되게끔 하는 것 같습니다.
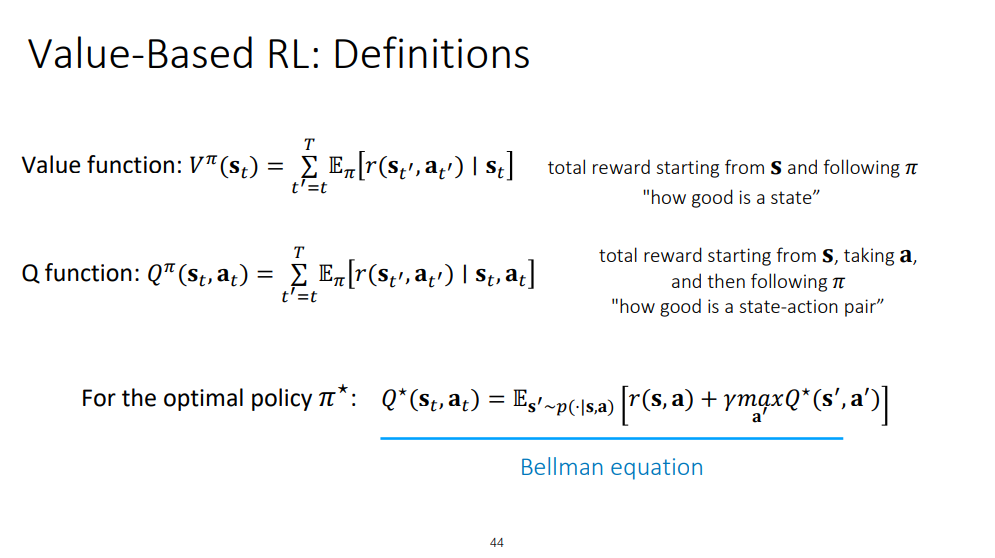
이 장에서는, 또 하나의 중요한 방정식에 대해서 설명한다고 합니다.
그 전에 앞서 pi^star는 optimal policy, Q*는 optimal policy pi^star하에서의 Q function 값이라고 하는 것 같습니다.
이러한 optimal policy pi* 하에서는 3 번째 수식인 Bellmal optimality equation이 성립한다고 하며, Q-learning을 수행함에 있어서 이 수식을 이용하게 될 것이라고 합니다.
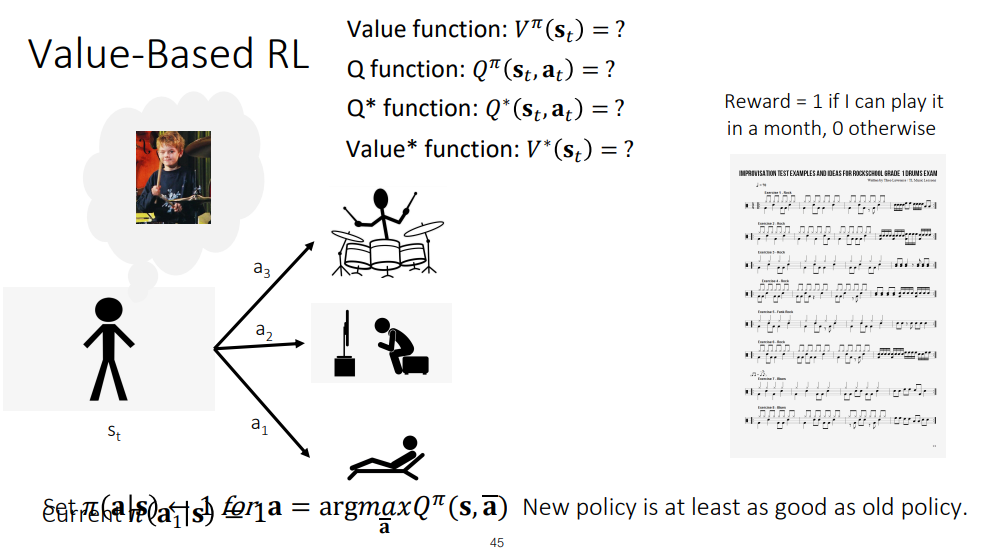
이 장에서는, bellman optimality equation의 concept을 이해하기 위해 카롤 교수님이 그린 그림들이 준비 되어 있습니다ㅎ
그림 속 졸라맨은 악보를 잘 연주해야 하며, 1달 안에 연주를 하면 reward 1, 아니면 0을 받는다고 합니다.
이때, 졸라맨의 action1은 휴식, action2는 드럼 비디오 시청, action3은 실제 드럼 연습이라고 합니다.
현재 policy가 pi(a_1|s) = 1 즉, 휴식을 선택하는 것이라고 할 때, V^pi(s_t)는?! 0이라고 합니다ㅎ action이 a_1일 때, Q^pi(s_t,a_t)는?! 넵 ㅎ 0이라고 합니다. a_2도 0은 아니지만 낮은 값이고.. 하지만 a_3일때는 1근처라고 합니다! 재미있는 예시네용
이 장 부터는 practical한 Q-learning algorithm 에 대해서 알아보겠다고 하십니다.
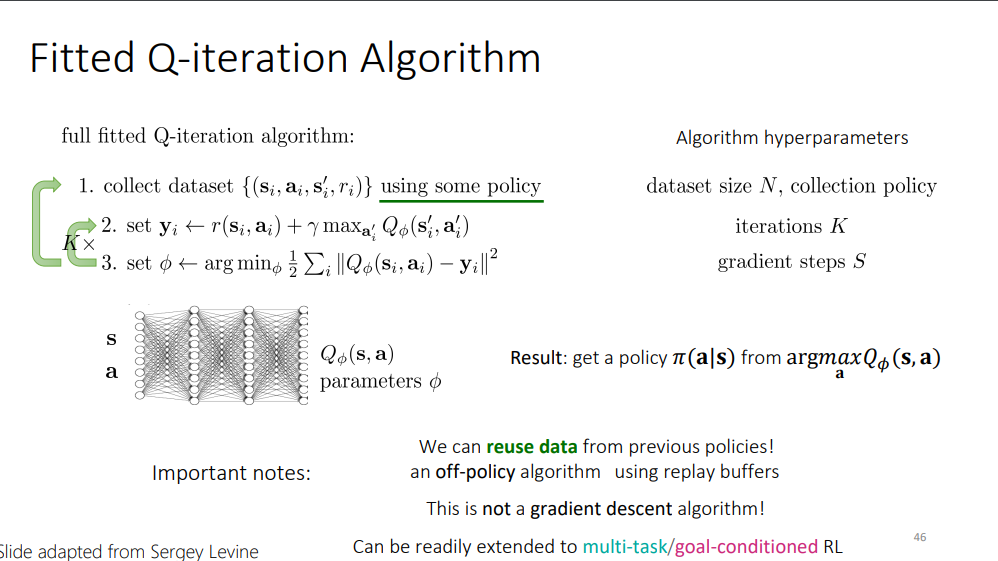
카롤 교수님이 설명하실 알고리즘은 Fitted Q-iteration Algorithm이라고 합니다. 해당 알고리즘은…
먼저 몇몇 정책을 이용해 dataset을 획득 (N size)
y = r(s, a) + gamma max_a Q(s’,a’)의 target 값을 계산
phi로 모수화된 Q(s,a)와 y의 차이를 최소화 시킬 수 있는 phi를 계산 (2~3을 K 번 반복, S만큼의 gradient step을 반복)
하는 과정으로 학습이 진행된다고 합니다.
또한, multiple action을 다룸에 있어서, 해당 알고리즘은 multiple head구조를 지닌다고 합니다. (여러 아웃풋)
그리하여, 결과로써 Q값을 최대화 하는 action을 고르는 greedy policy를 얻을 수 있다고 합니다.
또한, 해당 알고리즘은 previous policy들로부터 sample을 reuse할 수 있다고 합니다. (off-policy algorithm)
이때, sample을 관리하기 위해, 일반적으로 replay buffer를 사용한다고 합니다.
해당 알고리즘은 policy gradient와 따르게 gradient descent algorithm이 아니라고 하며(pi 입장), multi-task RL과 goal conditioned RL로의 이식이 쉬운 알고리즘이라고 합니다!
하지만 meta-learning으로의 확장은 어렵다고 하며, 뒤이어 설명한다고 하시네요!
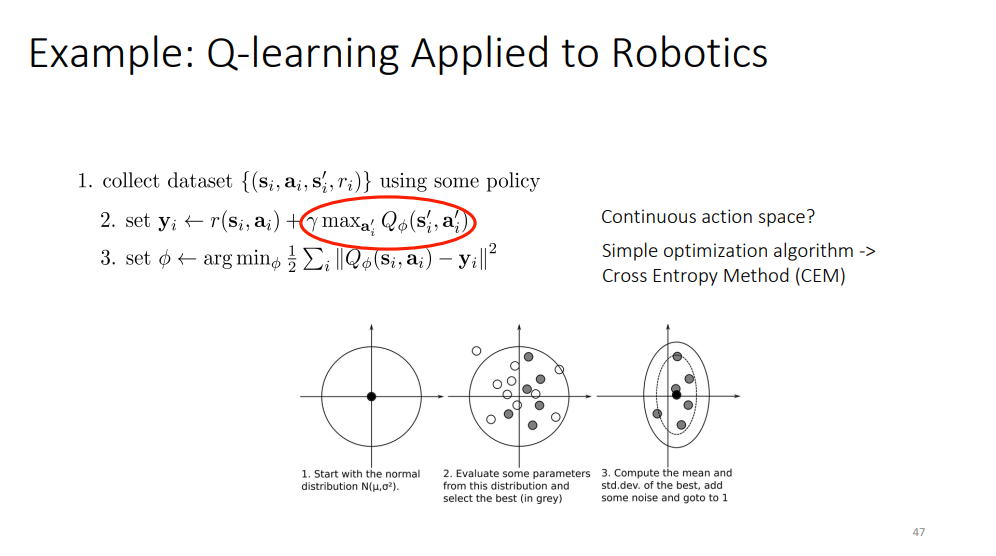
이 장에서는, 이전 연구이긴 하지만, Google에서 로봇을 이용해 했던 연구를 공유해 주셨습니다.
또한, Q-learning을 이용해 continuous action space를 커버하기 위해, CEM이라고 하는, cross entropy method 알고리즘을 사용했다는 내용을 공유해 주셨습니다.
이는 sampling 기반 최적화 알고리즘의 일종으로 보이며, 그림과 같이 1번 그림의 특정 표준 편차 내 표본을 샘플링 -> 평가 후 새로운 분포를 생성 -> 반복 의 과정을 통해 적절한 action을 선택하고자 하는 방법인 것 같습니다.
나머지는 Q-learning과 유사한 것 같습니다!
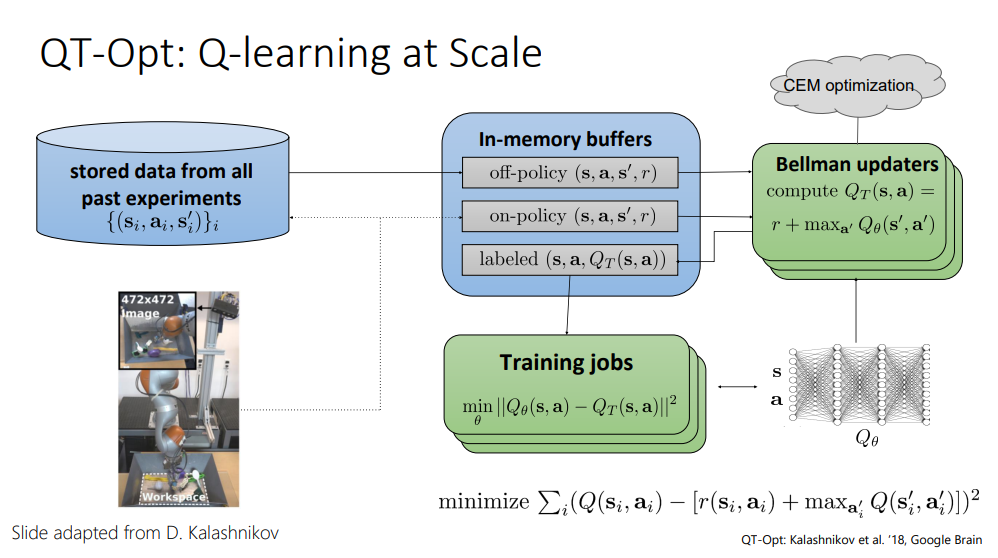
이 장에서는 Q-learning의 응용 버전인 QT-Opt에 대해서 설명해 주셨습니다.
이 또한 google에서 한 연구라고 하시네요ㅎ 로봇의 grasping task를 학습하기 위해 사용된 알고리즘이라고 합니다.
이 연구는 과거의 실험을 통해 얻어진 데이터들과 함께, on policy로 얻어진 data를 하나의 buffer에 저장하여 off-policy algorithm인 Q-learning의 장점을 십분 사용하고자 했던 알고리즘 같습니다.
DeepMind에서 유사하게 과거 Atari 게임 시연 데이터를 buffer에 넣은 Deep Q-learning form Demonstration을 봤던 기억이 나네요!
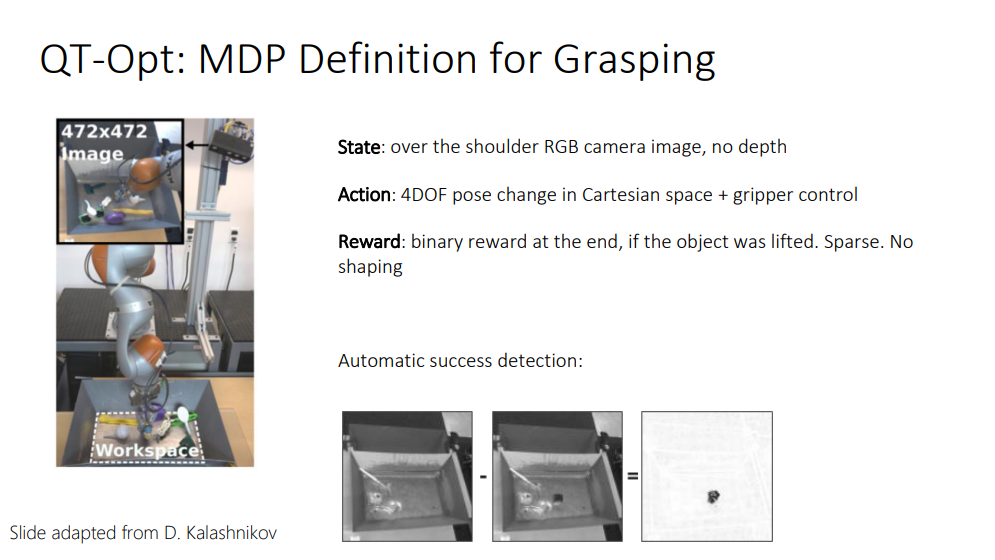
이 장에서는, 해당 QT-Opt를 통해 해결하고자 했던, Grasping task의 MDP formulation을 어떻게 했는지에 대해서 설명해 주고 계십니다.
State: RGB camera로부터 얻어진 2D image(partial observability)
Action: 4 자유도 pose 변화량 + gripper control 시그널
Reward: binary reward 0/1 (Sparse, No shaping setting)
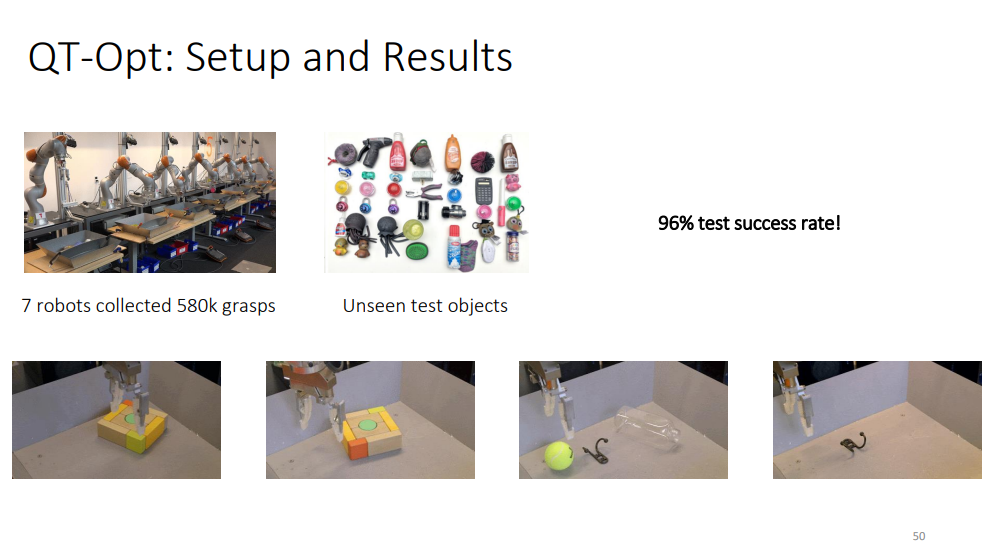
그에 대한 결과는 다음과 같다고 합니다.
총 7개의 로봇이 엄청나게 많은 데이터들을 몇 달 동안 수집하는 과정을 통했다고 하며, 그 결과, 학습에서 사용하지 않은 unseen object들도 96%의 성공률로 잡아냈다고 합니다. 몇 달이라… 한 번 실수하면 엄청 혼나겠군요
강의에서는 3번 째 사진의 small ball을 잡는 과정에서 사람이 툭 볼을 치는데, 그래도 다시 잘 잡았다고 합니다ㅎ
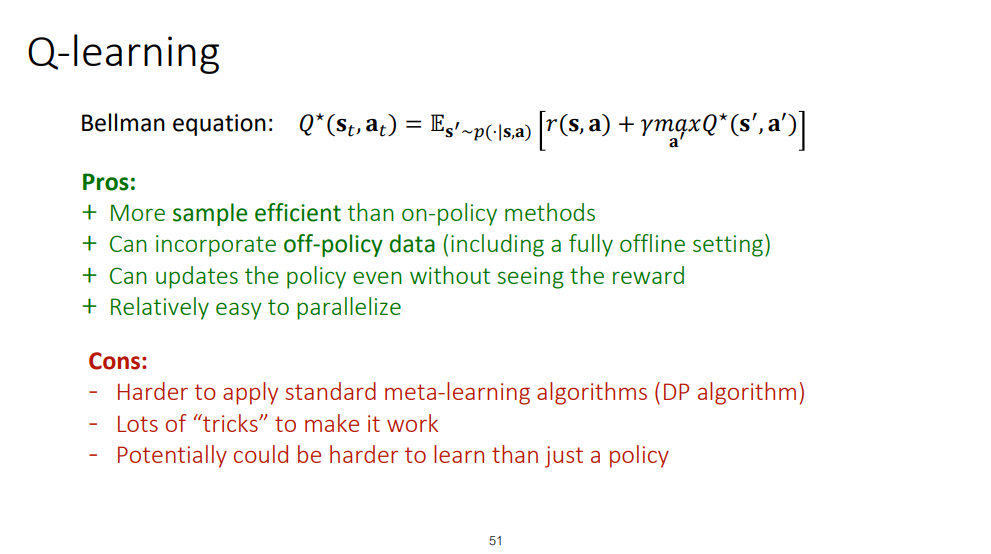
이 장에서는, Q-learning을 요약해 주셨습니다!
장점
on-policy methods들에 비하여 더욱 sample 효율적이다.
fully offline setting에서 수집된 데이터를 포함하여, 모든 off-policy data를 통합하여 학습에 사용 가능
reward signal이 없더라도, policy을 업데이트 하는 것이 가능!
policy gradient에서는 reward signal이 없으면 gradient 자체가 발생하지 않으므로 불 가능 했던 점이라고 합니다.
병렬화가 on-policy methods들에 비해 용이하다고 합니다. 즉 여러 환경을 쉽게 사용 가능하다고 하는 것 같습니다.
단점
standard meta-learning algorithm을 적용하는 것이 어렵다고 합니다.
왜냐하면, gradient 기반이 아닌, DP algorithm 기반의 loss function을 통해서 학습이 되기 때문이라고 합니다.
학습을 “안정적으로” 하게 하기 위해서 많은 여러 “트릭”들이 필요하다고 합니다.
Q function을 학습하는 것은 단지 정책을 학습하는 것에 비해, 잠재적으로 조금 더 어려움이 존재한다고 합니다.
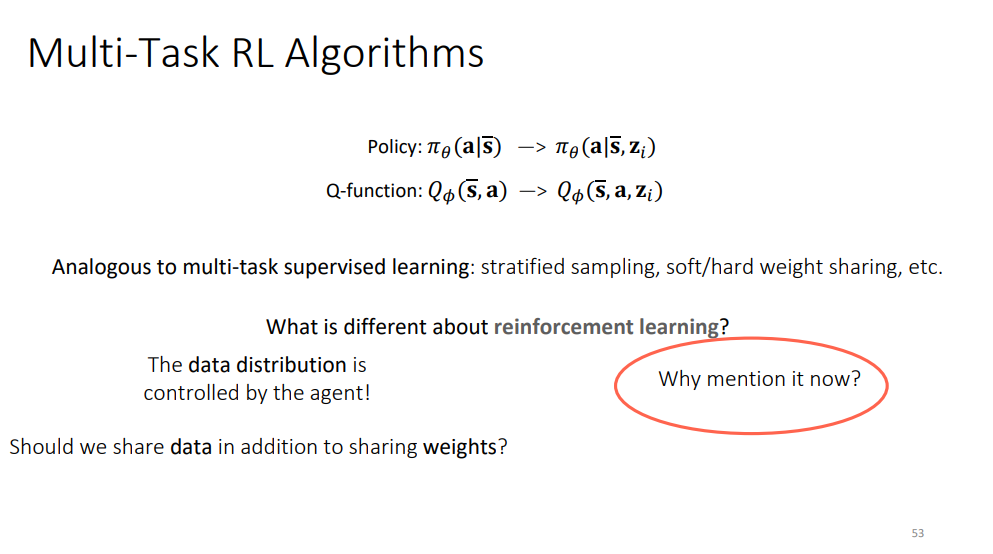
이 장부터 Multi-Task RL에 대해서 다룬다고 합니다.
Multi-task RL algorithm 측면에서, policy, Q function등 s를 이용하는 함수들을 task identifier가 augment된 s를 이용해서 중앙의 식들과 같이 표현할 수 있다고 합니다.
그 다음은 multi-task supervised learning과 비슷하게, 여러 trick들을 사용할 수 있다고 합니다.
stratified sampling
soft/hard weight sharing
etc
그러나, RL에서는 다른 점이 있다고는 합니다! 먼저, data distribution이 agent에 의해 control된다는 점!
그래서, 이러한 아이디어가 나왔다고 합니다. weight sharing을 하는 것 처럼, data sharing을 할 수는 없을까?
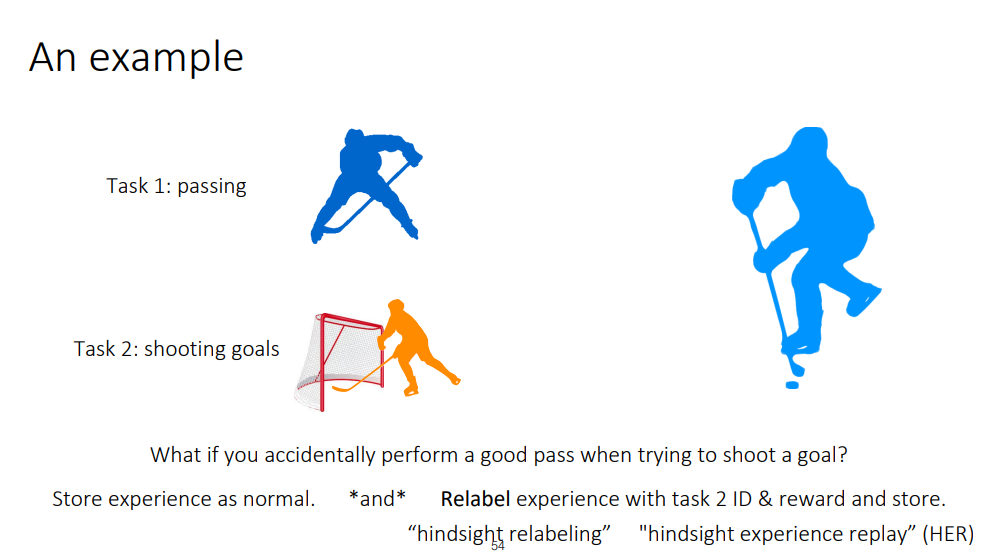
이 장에서는 다른 task들 사이에서 data를 어떻게 재사용 할 수 있을지에 대해서 논한다고 합니다.
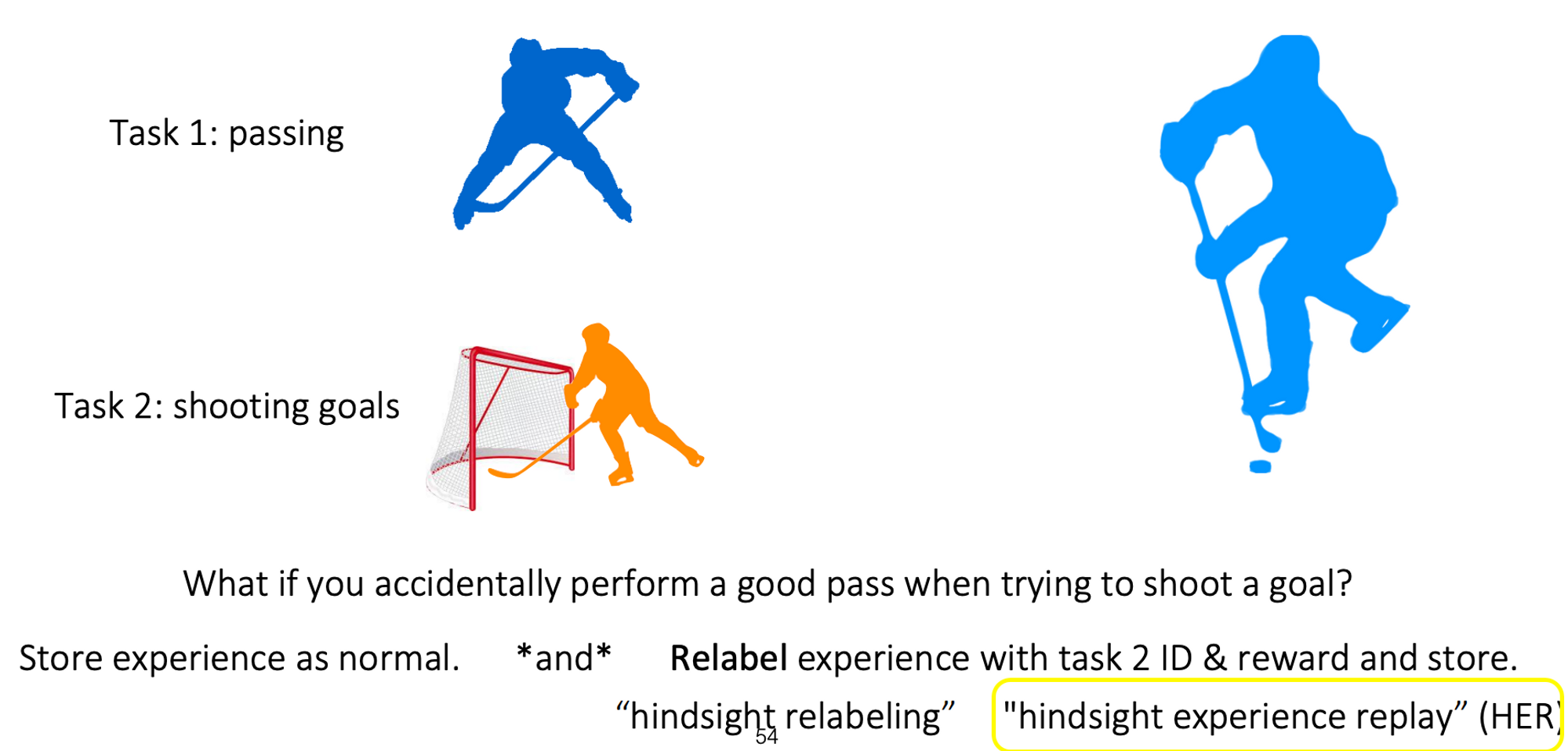
예시로써, 하키에 대해서 패싱, 슈팅 두 가지 태스크를 배우는 상황을 카롤 교수는 들었습니다.
이 때, 만약 슈팅을 했는데 이게 좋은 패스로 이어 졌다면?!
이를 패스로 다시 라벨링해서 reward 계산하고 저장하면 흐흐.. 쓸모 있는 경험이 되는 것이지요
이를 Hindsight relabeling이라고 하며 HER에서 제안된 방법론이라고 합니다.
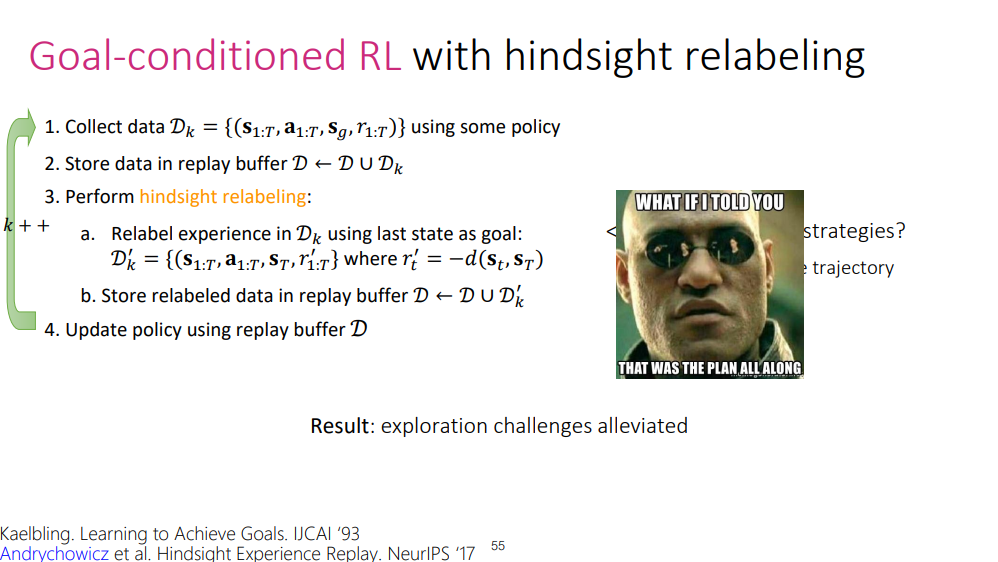
이 장에서는 해당 Hindsight relabeling을 이용한 학습이 어떤 방식으로 이루어지는지에 대해서 설명을 수행하고 있습니다.
정책을 이용한 data 수집
replay buffer D에 수집한 data D_k를 합치기
hindsight relabeling수행
이때, relabel은 last state를 기존의 goal 대신 새로운 goal로써 가정하여 진행이 된다고 합니다. => 즉, 최종적으로 도착한 곳을 목적지로로 봐줄께! 느낌인 것 같습니다.
이렇게 업데이트된 replay buffer를 통해 policy를 업데이트
카롤 교수님은 이때, last state뿐만 아니라 어떤 state라도 pseudo goal이 될 수 있다고 합니다.
이를 통해, 더욱 많은 경험들을 얻을 수 있으며, 탐험의 어려움이 완화 될 수 있다는 효과를 얘기해 주기도 하시는 것 같습니다.
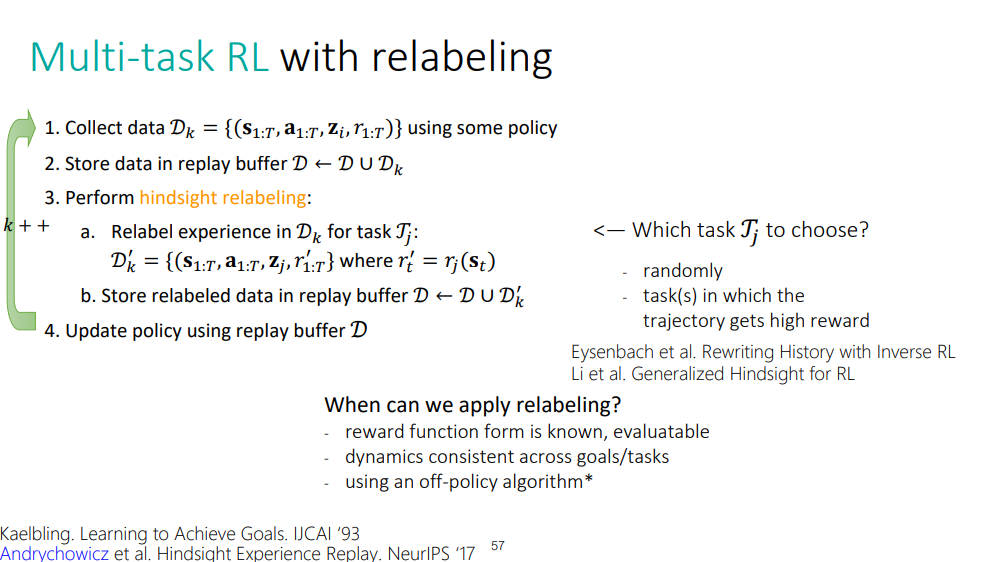
이 장에서는, multi-task RL에서 어떻게 relabeling이 가능할까에 대한 얘기를 다루는 것 같습니다.
정책을 이용한 data를 수집
replay buffer D에 수집한 data D_k를 합치기
hindsight relableing 수행
experience를 task T_j에 대해서 relabeling. 이때 기존의 reward대신 task j의 reward r_j(s_t)를 적용.
이렇게 업데이트된 replay buffer를 통해 policy를 업데이트
task별로 달라지는 reward에 대해서 relabeling을 해주는 점이 goal-conditioned RL에서의 relabeling과 다른 것 같습니다!
카롤 교수님은 이때, 어떤 task T_j를 선택하는 것이 좋을지에 대한 전략에 대해서도 앞서 last state를 고를때 처럼 언급해 주시고 계십니다. 임의로? high reward를 얻은 친구로?.? 이와 관련하여 슬라이드의 논문 두 개를 언급해 주셨습니다.
Q & A#
김누리
혹시 실제 데이터에 적용한 추가 사례가 더 있을까요??
민예린
강의에서 Multi-task rl나 goal-conditioned rl에 대해 얘기할 때 HER(hindsight experience replay)에 대한 언급이 있는데, multi-task와 goal-condition에서 HER이 어떤 방식으로 사용이 되는 건가요? 제가 단편적으로 이해하는 her는 sparse reward가 존재할 때 효과적으로 학습할 수 있는 알고리즘(또는 방법)이어서 HER의 아이디어를 어떤식으로 결합하여 활용하는지 궁금합니다! 마침 승언님께서 예전에 HER에 대해 리뷰한 게시글을 찾았기 때문에 다른 분들보다 더 정확하게 알고 계시지 않을까 싶어요!! => 가볍게 생각해 본다면 s’와 s의 distance를 reward에 활용하는 부분인가 싶기도 합니다
승언: 부끄럽게도 완벽히 이해한 상황은 아니지만, 제가 이해한 선에서 한 번 설명을 드려보겠습니다!
로보틱스에서 많이 사용되는 Goal-conditioned RL에서는 말씀하신대로 획득한 trajectory가 goal state g에 도달하지 않았더라도, 1) trajectory내 임의의 혹은 최종 state s_T를 goal position으로 가정. 2) 해당 state s_T와의 거리의 음수를 새로운 reward 함수로 정의 3) 획득한 trajectory의 sparse reward( 도달 못 했으므로 r_t = 0 )을 dense reward( r_t = |s_T - s| )로 바꿔서 재 저장 하는 방법을 주로 쓰는 것 같습니다.
multi-task rl에서 얘기하는 HER은 제가 읽었던 논문의 후속 논문에서 나온 내용을 강의에서 해주신 것 같으며, 강의의 앞 단에서 “RL에서의 task는 하나의 MDP다!”라는 설명을 해주셨는데, task가 다르다는 것에는 MDP 요소 중 하나인 reward가 다르다는 것을 포함하는 것 같습니다.
그래서, 제 생각에는 1) state space S, aciton space A, transition function P등은 동일한데 reward가 다른 MDP1(S, A, R1, P, gamma), MDP2(S, A, R2, P, gamma)를 학습하는 multi-task rl에서 2) MDP1에서 얻은 trajectory를 싹 받아서 MDP2의 reward function으로 재 저장(relabelling) 3) 해당 trajectory를 통해 MDP1에서 얻었지만 MDP2를 학습할 때도 재 사용 한다고 이해 했습니다!
동일한 MDP에서 robot 종류만 달라도 multi-task로 볼 수 있는 거 같은데 제가 이해한 게 맞을까요? 만약 그렇다면 offline bin packing 문제에서 동일 MDP 내에 task indicator를 추가하면 multi task rl이라고 정의할 수 있을까요? (쌓을 물건의 조합을 미리 알고 있는 경우로 예를 들어 task 1 : A, B, C type, task 2 : D, E type, task 3 : A, D type 등) => 제가 지금 풀고 있는 문제가 muti-task 였나 .. 싶어서 여쭤봅니다 ㅎㅎ
승언: 1) robot 종류가 다를 경우, 로봇의 역학 식이 달라져 input ⇒ output 궤적이 달라질 것 같아서 transition function P가 다르고, 이는 다른 MDP이기 때문에, 강의에 따르면 MDP가 다르면 multi-task라고 하는 것으로 저는 이해를 했던 것 같습니다! 쓰고보니 비문같네요 2) 저도 제 문제에 대해, 유사한 생각을 하고 있어서 맞지 않을까 싶습니다ㅎㅎㅎ task indicator가 추가 되고, 물건이 바뀌면 state space S와 transition function P가 달라지는 느낌 아닐까 싶어요! 아닌가… 조금 어렵네요 task indicator가 추가 된다고 해도 one-hot encoding이면 state space S는 같을 것 같기도 하고… => task identifier를 추가하면 state space가 달라지므로 MDP가 달라질 수 있습니다다. (범진님)
그리고 승언님이 지금 풀고 계시는 문제를 multi-task rl로 formulate 하면 as is -> to be가 어떻게 될지도 궁금합니다!
승언: as is: 도메인 metric 1과 도메인 metric2를 reward로 학습하는 agent 2개를 따로따로 학습 → to be: task identifier에 따라 metric1 혹은 metric2를 reward로 학습하는 하나의 agent를 학습 하면 좋을 것 같다는 생각이 강의 중에 들었습니다!
박범진
Imitation learning이 reward 가 1 인 강화학습인 이유는 무엇인가요?
승언: Imitation learning의 경우, state라는 input에 대해 pi(a|s)라고 하는 분포를 학습하는 지도학습 문제로 볼 수 있기에, MLE로 목적 함수를 모델링 할 수 있는 것 같습니다. 그렇게 보았을 때, policy gradient term과 밑의 사진처럼 sum of reward의 곱만 수식적인 차이가 나기 때문에, 만약 sum of reward가 1인 강화학습이면 imitation learning과 수식적으로 같다..? 정도인 것 같습니다….
다른 논문을 참고해보니, MLE 즉 모방학습은 return이 1이어서 training data를 넘어서는 학습이 어렵다 라고 하네요. 흠..
이홍규
왜 on-policy 메서드에서는 HER 트릭을 사용할 수 없을까요?
승언: trajectory를 저장하면서 relabelling하는 알고리즘에서만 사용할 수 있기 때문인 것 같습니다. 일반적인 on-policy algorithm은 trajectory를 얻으면 그 trajectory에서 학습하고 저장하지 않고 휘발시켜 버리기 때문에 relabeling해서 저장하는 프로세스 자체가 끼어들 공간이 없을 것 같습니다. 그래서, PPO와 같이 임시 버퍼에 trajectory를 임시로 저장해서 사용하는 구현이 가능한 특정 알고리즘 같은 경우에는 HER을 사용할 수 있을 것 같습니다. (단지 의견)
HER과 유사하지만, 다른 컨셉으로 Self-Imitation learning이라고 하는 알고리즘이 있습니다. Self-imitation learning의 경우 on-policy alrightm과 병행하여 사용할 수 있는 off-policy algorithm으로, 특이하게도 episodic replay buffer를 사용하여 task에 성공한 trajectory만은 저장을 해서 정책을 업데이트 시킬 수 있는 알고리즘 입니다.
HER이 못 했어도 괜찮어~ 거기까진 한거잖어~ 라면
SIL은 내가 이렇게 했을 때 잘했었잖어~ 인 것 같습니다.
Action의 Space가 연속적이라면, 게다가 벡터의 형태를 가질 경우는 Policy Network를 어떻게 구현해야 할까요?
강의에 소개되지 않았지만 더 추가적으로 언급하고 싶은 강화학습 메서드들이 있으실까요?
승언: 먼저, Goal-conditioned RL의 이론적 근거가 되는, 즉 goal을 state의 일부로써 생각할 수 있게 만들어준 UVFA(Universal Value Function Approximation)논문을 읽으면 좋을 것 같다는 생각이 듭니다. 추가적으로 언급하고 싶은 메서드로는, 강의에서는 소개되지 않았지만, HER에서 한 발 더 나아간, 변화하는 Goal을 다루는(Dynamic goal) DHER 알고리즘이 있을 것 같습니다. 해당 논문을 읽으려던 차에, 이직으로 인해 Dynamic Goal을 다룰 일이 없어져, 저는 읽지 않은 논문이지만, 로봇 팔 제어 등 Goal-conditioned RL 문제를 푸셔야 하는 분들께는 이동하는 목표를 학습할 수 있는 좋은 메서드가 되지 않을까 생각이 됩니다
채지훈
goal-state가 여러 개가 존재한다면 여러 개의 goal-state에 의해서 multi-task 문제로 표현되는 걸까요?
승언 : (추가) 흠.. 강의를 다시 보니, task identifier z_i의 종류 중 하나로 goal state를 사용한 것을 보면 multi-goal이면 multi-task인 것 같기도 하네요ㅠ 도움!!